▼てくにかるかんふぁれんす
大学のゼミが、午前中から午後にかけてあり、行けず。(T▽T)懇親会もお金を払っていないから行けず。(>-<)か・・・かなしい。初めての欠席である。いかん!モチベーションが上がらんでは無いかっ!放電しっ放しでそろそろやばいかもなぁ。むむぅ〜。
▼んで・・・
今回から改名したハタちゃんからメールが来る。「カンファレンス来ないの?」うぅ・・・いけないんですぅ。二次会なら行けると返信。結局行く事にしました。まぁ、仕度とかあったんで、出たのは8時10分過ぎかな。
3次会になるんじゃないか?という状況下で、川崎に降下したのであった。(って、あんたどこから降ってきてるんだ)
▼毎度の事
毎度のことであるが、何か動かそうとすると、コネクタ忘れたり、電源忘れたりとあり、結局動かせないが、今回もまた同じ。変換用の電源コネクタを、忘れてきました。(T▽T)しかぁ〜し!今回は試作5号機がそのピンチを救ってくれたのであった。
マイコン用の9Vバッテリーのコネクタがちょうど良いコネクタであり、そのまま接続!俺サーボ起動!良かった良かった。
▼えまのんさんにいろいろ指摘され
俺サーボで行き詰まり感があったのですが、その打開策、不安な事などをお聞きし、また教えてくださったのである程度方針が立ちました。一番の収穫です。この場をお借りして御礼申し上げます。ありがとうございました!
これで、市販のデジタルサーボを越えられれば、かなりハッピー。とりあえず、また歩行試験型を作ってみようと思います。また制御方法が変わる・・・かな。
▼公開時期を外した。
実は、いろいろと公開しようと考えていたら、公開し忘れてそのまんまになってしまったものがいくつかあったので、載せますね。数点ほど。(^−^;
最近、ちと忙しいのが難点。でも、トクトクがようやく表示されたので良い機会なので更新、更新。
▼カレイナット
今回のWegweiser二号機(未完成)の胴体ですが、ネジを締め緩めと何度かやっているうちにネジ穴が馬鹿になってきてしまいました。そろそろ限界です。困った困った。という訳で登場のカレイナットです。
このナットの存在を知っている方もいるかと思います。このナット、アルミ板に圧入することで、アルミ板に固定できます。外れません。
謎の声A「それなら何でやらなかったんや?」
謎の声B「ふふふ、それはですね奥さん。あの人、おバカだから下穴の空け方間違えてたんだと。」
謎の声A「あー、それで今までずれるとか、精度が当てにならないなんておバカな叫びをしてたんだ。ぷぷ」
謎の声B「ナイスボケ。いいぞ〜もっとやれ〜」
・・・
グサグサッ
(事実なので言い返せず)まぁ、ともかくそういうことです。はい。
今後忘れないためにも、詳細を下記に記載しておきます。
▼カレイナット「圧入方法」


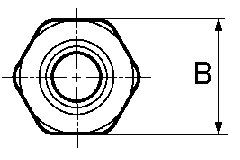
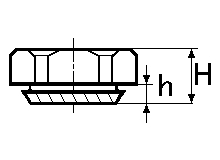
まず、φ4.5(穴径4.5mm)を空けます。今回使うのはM3(3ミリネジ)を使うので、この大きさでOKです。で、これを圧入するのには、M3のステンレスキャップ(六角形の穴のネジ)を使います。十字ネジは決して使ってはいけません。最悪の場合、頭が潰れてネジが回らなくなります。(^−^;


工具はこの六角レンチを使います。六角レンチは100円ショップでも売っています。なければホームセンターか、工具専門店へ行きましょう。手に入らない事はないと思います。
さて、工具も揃ったらいよいよ圧入ですね。多少力がいりますけど、疲れるほどでもないんで大丈夫です。


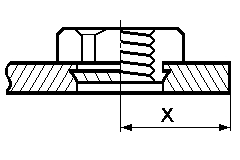
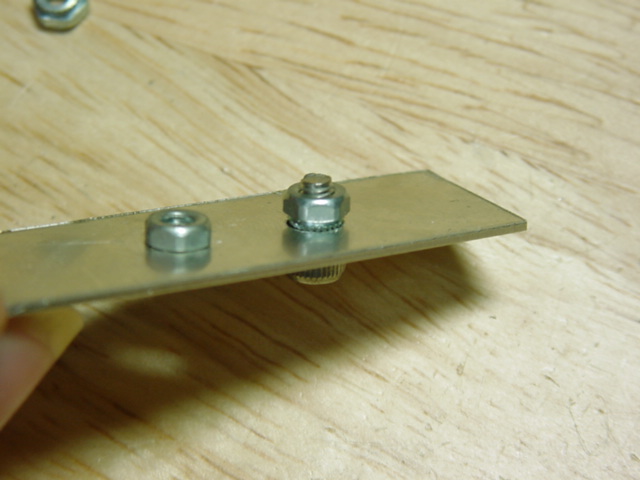
写真のようにセットしてください。左の写真ではネジは裏の方についています。このときカレイナットを逆さに取り付けないように。(そんな人いないって)ちなみに私は、ネジとアルミ板の間に平ワッシャーを二枚挟んでいます。多少まわしやすいかな?で、六角レンチを右の写真のように挿したら、準備完了!


回らなくなるまで回しましょう。と言っても、回しすぎると頭が潰れるので回しすぎてもダメです。目安は、アルミ板にナットがくっついているような状態に見えれば、それでOKです。何回かやるうちに圧入し終わったかどうか分かってきます。
右の写真のようになっていれば完成です。なかなかに強力です。これであなたのロボットもメンテナンス性がアップ!
▼カレイナット「入手篇」
さて、問題のカレイナットはどこにあるんですかねぇ。秋葉原のネジ西川でもM3以上しか取り扱っていない(と思う)です。M2が欲しい場合は困りますよね。で、ネットを探していたら、この店で売ってました。
ノナカ金物店
すぐカレイナットの注文をしたい方はこちら ⇒
カレイナット(お取り寄せ商品)
100個単位で購入できます。注文してから届くまで若干かかりますので、必要な時はすぐ頼みましょう。
[BACK]
[TOP]
[NEXT]
Copyright (C) 2004 U-hirohito All rights reserved.