仴戞俀師壌僒乕儃壔寁夋巒摦
丂慜夞偺戞堦師壌僒乕儃壔寁夋偼僞僀僯乕仌廃曈夞楬偑戝偒偡偓傞偲偄偆帠偱丄偁偊側偔捵傟傑偟偨丅偱丄崱夞偼偲偄偆偲丄僠僢僾晹昳偑巊偊傞傛偆偵側偭偨帠丄媨揷偝傫偺僇儞僼傽儗儞僗偑偁偭偨傝偟偨帠側偳偵傛傝丄彫宆壔仌惈擻UP偑壜擻偲側偭偨偺偱丄奐敪傪嵞奐偟傑偟偨丅偦傫側栿偱偪傚偭偲崱傑偱偺宱夁側偳傪丒丒丒丅仴朰傟偡偓丒丒丒
丂偐側傝媣乆偵FET傪偄偠傞帠偵側傝丄媨揷偝傫偺儁乕僕偱H僽儕僢僕偺偍曌嫮丅偱丄幚嵺偵慻傒忋偘偰壩傪擖傟偨偑丄摦偐偢丅僲乕僩偵夞楬恾傪戝検偵彂偄偨傝丄慻傒捈偟偨傝偟偰偄傑偟偨偑丄摦偐偢丅側傫偱偩傠偆偲巚偭偰偄偨傜丄Pch偲N們倛偺FET傪D乮僪儗僀儞乯偲S乮僜乕僗乯傪媡偵愙懕偟偰偄傞偲敾柧丅丂捠忢揹尮偼S乮僜乕僗乯懁偵丄儌乕僞乕偼D乮僪儗僀儞乯懁偵愙懕偟傑偡偑丄偙傟傪媡偵偟偰偄偨傛偆側偺偱偡丅偦傝傖摦偐傫傢丒丒丒偲偄偆偐丄惗偒偰傞偺偐両丠儼乮丳仱丳丂乯丂壩傪擖傟傞帪丄摦偐側偗傟偽偡偖揹尮傪棊偲偟偰偄傑偟偨偗偳丄偳偆側傫偱偡偐偹偉丅
仴嵟弶偺帋嶌夞楬

 丂
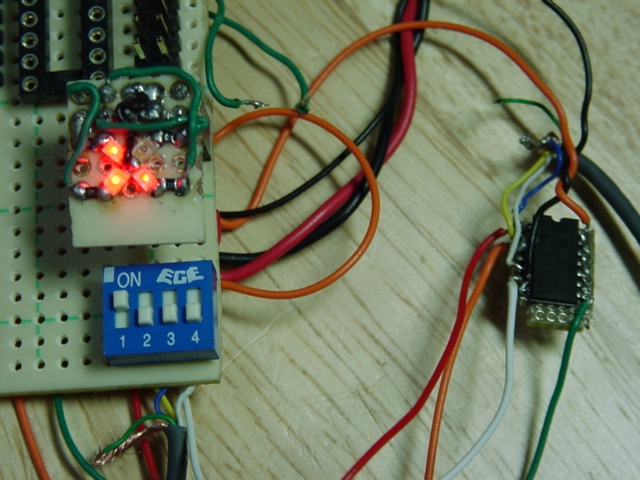
丂偼偄丅嵟弶偵壱摦偟偨帋嶌儌乕僞僪儔僀僽夞楬偲僆儁傾儞僾偱偡丅夞楬偼媨揷偝傫偺FET偱儌乕僞僪儔僀僶偵婰嵹偝傟偰偄傞夞楬偺2SK1132偺G乮僎乕僩乯傛傝丄2SK2231傊怢傃偰偄傞慄傪愗抐偟丄偙偺愗抐偟偰僼儕乕偵側偭偨攝慄傪傕偆堦偮偺擖椡偲偟偰巊梡偡傞偲偄偆傕偺偱偡丅
丂
丂偼偄丅嵟弶偵壱摦偟偨帋嶌儌乕僞僪儔僀僽夞楬偲僆儁傾儞僾偱偡丅夞楬偼媨揷偝傫偺FET偱儌乕僞僪儔僀僶偵婰嵹偝傟偰偄傞夞楬偺2SK1132偺G乮僎乕僩乯傛傝丄2SK2231傊怢傃偰偄傞慄傪愗抐偟丄偙偺愗抐偟偰僼儕乕偵側偭偨攝慄傪傕偆堦偮偺擖椡偲偟偰巊梡偡傞偲偄偆傕偺偱偡丅丂Pch偺2SJ377偼丄2SK1132傪夘偟偰娫愙揑偵憖嶌丄Nch偺2SK2231偼儅僀僐儞偺I/O億乕僩乮PWM乯偵愙懕偟偰捈愙憖嶌偡傞偲偄偆傕偺偱偡丅偙傟偑偄偄偺偐埆偄偺偐偼丄偁傫傑傝暘偐傝傑偣傫偑丄偙偺婰帠偱傗偭偰傞偙偲偲戝偟偰曄傢傜側偄偺偱栤戣側偄偲巚偄丄偙偺曽朄傪巊梡丅
丂偝偰丄偙偺傑傑偱偼H8/3664偱偼1屄偟偐僒乕儃傪憖嶌偱偒傑偣傫丅崱夞傕傗傝傑偟偨丅壌僒乕儃壔偺媬悽庡丄儘僕僢僋IC偱偡丅傗偼傝偙傟偑側偗傟偽巒傑傝傑偣傫偹丅乮^-^丟
仴LOW-SIDE PWM惂屼傪PWM堦杮偱峴偆
 丂
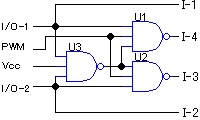
丂夞楬恾偲恀棟抣昞偱偡丅乮偙傟嶌傞偺偵1帪娫妡偐偭偰偟傑偭偨丅(-_-||| 乯 僶乕僯儞僌偟偰偟傑偆儕僗僋偼偁傞傕偺偺丄偦傟偝偊婥傪偮偗傟偽栤戣偁傝傑偣傫丅
丂
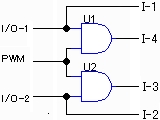
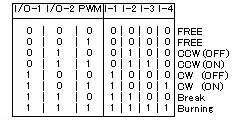
丂夞楬恾偲恀棟抣昞偱偡丅乮偙傟嶌傞偺偵1帪娫妡偐偭偰偟傑偭偨丅(-_-||| 乯 僶乕僯儞僌偟偰偟傑偆儕僗僋偼偁傞傕偺偺丄偦傟偝偊婥傪偮偗傟偽栤戣偁傝傑偣傫丅丂侾偮偺RC僒乕儃偵偮偒丄AND夞楬偑2夞楬偁傟偽偄偄偺偱丄H8/3664TINY傪巊偆側傜偽丄PWM偑3屄側偺偱丄6屄偁傟偽OK偱偡丅偝傜偵捠怣偵AND夞楬偑2夞楬昁梫側偺偱丄崌寁8屄丅偙傟偑側傫偲丄偪傚偆偳儘僕僢僋IC2屄暘側傫偱偡傛偹丅
丂帋嶌1崋婡偵偼偙傟傪巊偄傑偟偨丅摦偒傕栚榑尒捠傝偱偟偨丅偆傫丄偄偄姶偠偩丅
仴僼傿儖僞
丂慜夞偼僒儃偭偰偄偨丄僲僀僘懳嶔傪崱夞傗偭偰傒傑偟偨丅傑偢偼億僥儞僔儑儊乕僞偵僆儁傾儞僾傪晅偗傞偲偄偆傕偺丅巊偭偨偺偼LMC662偲偄偆8PIN僞僀僾丅儗乕儖亅僩僁亅儗乕儖偲偄偆傕偺傜偟偔丄僆儁傾儞僾偵宷偄偱偄傞揹尮偺揹埑傑偱峴偭偰偔傟傞偲偐乮梋傝椙偔暘偐偭偰偄側偄恖乯丅丂偙傟偼寢峔柺搢側傕偺偱丄擖椡揹埑偼2.5V埲壓偱側偄偲弌椡偝傟傞抣偑偍偐偟偔側偭偰偟傑偆偺偱偡丅擖椡抂巕偼儗乕儖亅僩僁亅儗乕儖偠傖側偄偺偹丒丒丒(T-T)丅偦傫側栿偱丄億僥儞僔儑儊乕僞偺怣崋傪掞峈婍偱1/2偵暘埑偟丄偦傟傪擇攞偵偡傞偲偄偆柺搢側嶌嬈傪偡傞丅
丂偙傟偱栤戣側偄偼偢丒丒丒偲巚偭偨偑丄A/D偱庢傝崬傫偩抣偑曄丅偱丄挷傋偨寢壥丄330兌偱暘埑偟偨偺偑尨場偩偭偨傛偆偱偡丅偦傝傖丄曄傢傝傑偡傛丒丒丒丅偲丄尵偆栿偱丄10K兌偵岎姺偟偨傜栤戣側偔摦嶌丅偟偐偟丄億僥儞僔儑儊乕僞偐傜捈愙庢偭偰偄側偄偺偱丄懡彮尭偭偰傑偡丅
丂偝偰丄偙偺忬懺偱暯嬒壔偟偰抣傪尒偰傒傞偲丄抣偑傎偲傫偳曄摦偟傑偣傫丅456偲昞帵偝傟偨傜偢偭偲456偺傑傑丅慜夞傑偱偼抣偑僼儔僼儔偲亇俀乮A/D抣乯偔傜偄曄摦偟偰偄偨偺偵丄僺僞僢偲巭傑偭偰傞傫偱偡丅偨傑偵曄摦偟傑偡偑丄偦傟傕亇侾偔傜偄丅
丂岠壥愨戝偱偡両偝傜偵丄A/D億乕僩偺捈慜偵RC儘乕僷僗僼傿儖僞傪慻傓偲偝傜偵曄摦偑彮側偔側傝傑偡丅巆擮側偑傜H8/3664TINY偼丄A/D偺揹尮偑儃乕僪忋偱Vcc偵愙懕偝傟偰偍傝丄僐僱僋僞偺曽偵偼弌偰側偄偺偱丄偙偺懳嶔偼偱偒傑偣傫偱偟偨丅偟偐偟側偑傜丄偦偺岠壥偼愨戝偱偡丅
仴PID偺曽偼丒丒丒
丂慜夞傛傝丄僎僀儞偼崅偔偱偒傞偟丄挷惍偟傗偡偔側傝傑偟偨丅曐帩椡傕慜夞傛傝UP偟偰偄傑偡丅偟偐偟丄I乮愊暘乯偺挷惍偑側偐側偐偆傑偔偄偐偢丄曐帩椡偼偁傑傝忋偑傜偢丅PD惂屼側傜偽丄曐帩椡偼KRS-2346ICS乮曐帩僩儖僋嵟戝愝掕偲斾妑乯偔傜偄偼弌偣傞傛偆偱偡乮儘儃僐儞儅僈僕儞傛傝乯丅丂P乮斾椺乯偲D乮旝暘乯偺僎僀儞偩偗偱挷惍偟偰偄偔偲丄傗偑偰怳摦偑丒丒丒丅90亱偐傜0亱傊峴偔偲偄偆幚尡傪偟偰偄傑偡偑丄堏摦偟偰巭傑傞帪偼栤戣側偄偺偱偡偑丄0亱偺帪偵偪傚偭偲偟偨怳摦傪梌偊傞偲丄廂懇偣偢偵怳摦偟偭傁側偟丅
丂悽娫偱偼桳柤側僾儖僾儖尰徾偭傐偄偱偡丅懱尡偟偨偺偼弶傔偰丅偪傚偭偲偟偨怳摦側偺偱丄偙偺怳摦偑儘儃僢僩偺懱傪揱傢傟偽偝偧偐偟慺惏傜偟偄僾儖僾儖尰徾偑尒傟偨偩傠偆丅側偐側偐偵擄偟偄丅
丂偪側傒偵丄2174FET偺捠忢僊傾僶乕僕儑儞偱偡丅傓丠側傜偽僴僀僷乕僊傾側傜傕偆彮偟峴偗傞偺偐側丠偱丄I偑忋偑傜側偄偺偱僇儞僼傽儗儞僗帒椏偵偁傞乽僎僀儞偑忋偑傜側偄応崌偼尰嵼埵抲偺庢傝崬傒曽朄傪尒捈偡傋偟乿偺尵梩偵廬偄丄暯嬒壔偵拲栚偟傑偟偨丅偲偄偆偺傕丄32屄偺抣傪暯嬒壔偟偰偍傝丄抣偺曄壔偑抶偄偺偱8屄偵曄峏丅
丂偡傞偲丄僲僀僘偺塭嬁偑尰傟巒傔偨偺偱丄柧傜偐側僲僀僘傜偟偒僨乕僞傪嶍彍偡傞僾儘僌儔儉傪壛偊傛偆偲偡傞丅偙偺嶌嬈拞偵僔儑乕僩偟偨傜偟偔丄僞僀僯乕巰朣丅幚尡拞抐丅偆乣傓
仴戝偒偝偲偐
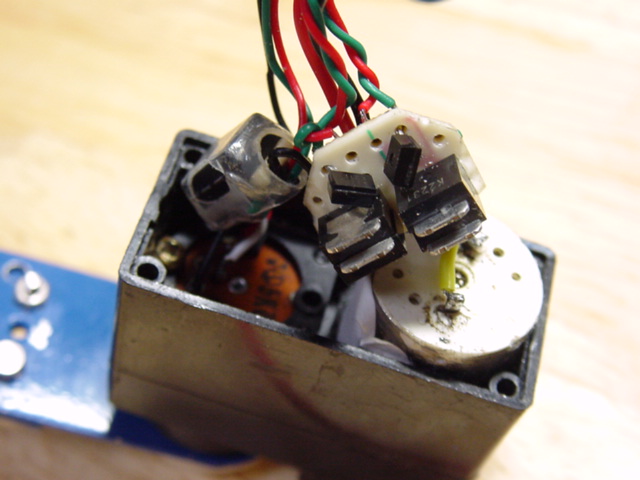
丂戝偒偝偼丄忋偺幨恀傪尒偰偄偨偩偗傟偽暘偐傞捠傝丄働乕僗偵廂傑傝傑偡丅偲偙傠偑丄崱傑偱惢嶌偟偨巹偺儘儃僢僩偼働乕僗偺奧傪徣偄偨忬懺偱儘儃僢僩偑峔惉偝傟偰偄傑偡丅丂偮傑傝丄尰嵼偺愝寁偱偼偙傟傜FET傪搵嵹偡傞偺偼晄壜擻側偺偱偡丅偦傟偲丄崱夞偺愝寁偼儊儞僥僫儞僗惈偵婥傪庢傜傟偡偓丄崉惈偑嵟埆偱偟偨丅嵞愝寁丒丒丒旔偗偰捠傟側偄摴偵側傝偦偆偱偡丅傑偀丄壌僒乕儃偑摦偐側偔偲傕丄捠忢偺惂屼婎斅偼彫偝偄偺偱丄愝寁偺曄峏傪偣偢偵摦偐偡帠偑壜擻偱偡偹丅
 丂娧捠揹棳偺棳傟傞儌乕僪偑懡偡偓偰丄榖偵側傝傑偣傫両偙偺傑傑巊偊偽FET偺庻柦偼妋幚偵弅傑傞偟丄擱偊傑偡偹偒偭偲丅
丂娧捠揹棳偺棳傟傞儌乕僪偑懡偡偓偰丄榖偵側傝傑偣傫両偙偺傑傑巊偊偽FET偺庻柦偼妋幚偵弅傑傞偟丄擱偊傑偡偹偒偭偲丅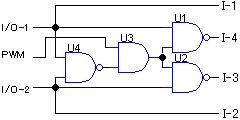 丂偪傚偭偲撪梕偑暋嶨偵尒偊傞偐傕偟傟傑偣傫偑丄摦嶌偼扨弮偱偡丅U1偲U2偩偗偵拲栚偟偰偔偩偝偄丅U3偐傜偺弌椡傪PWM偲壖掕偡傟偽丄壗偺帠偼柍偄慜夞偺AND夞楬偺斀揮僶乕僕儑儞側偩偗側偺偱偡丅
丂偪傚偭偲撪梕偑暋嶨偵尒偊傞偐傕偟傟傑偣傫偑丄摦嶌偼扨弮偱偡丅U1偲U2偩偗偵拲栚偟偰偔偩偝偄丅U3偐傜偺弌椡傪PWM偲壖掕偡傟偽丄壗偺帠偼柍偄慜夞偺AND夞楬偺斀揮僶乕僕儑儞側偩偗側偺偱偡丅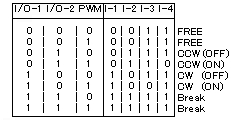 丂側傜偽丄I/O-1偲I/O-2偑侾乮High乯偺帪偼PWM傪侽乮Low乯偵偡傟偽丄栤戣偼夝寛偡傞傢偗偱偡丅偦偙偱崱夞丄NAND夞楬偺廗惈偱偁傞丄擖椡怣崋偑乽1,1乿偺帪偩偗丄弌椡偑侽乮Low乯偵側傞偲偄偆揰偵拝栚偟傑偟偨丅
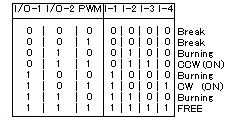
丂側傜偽丄I/O-1偲I/O-2偑侾乮High乯偺帪偼PWM傪侽乮Low乯偵偡傟偽丄栤戣偼夝寛偡傞傢偗偱偡丅偦偙偱崱夞丄NAND夞楬偺廗惈偱偁傞丄擖椡怣崋偑乽1,1乿偺帪偩偗丄弌椡偑侽乮Low乯偵側傞偲偄偆揰偵拝栚偟傑偟偨丅