▼第2次俺サーボ化計画始動
前回の第一次俺サーボ化計画はタイニー&周辺回路が大きすぎるという事で、あえなく潰れました。で、今回はというと、チップ部品が使えるようになった事、宮田さんのカンファレンスがあったりした事などにより、小型化&性能UPが可能となったので、開発を再開しました。そんな訳でちょっと今までの経過などを・・・。
▼忘れすぎ・・・
かなり久々にFETをいじる事になり、宮田さんのページでHブリッジのお勉強。で、実際に組み上げて火を入れたが、動かず。ノートに回路図を大量に書いたり、組み直したりしていましたが、動かず。なんでだろうと思っていたら、PchとNchのFETをD(ドレイン)とS(ソース)を逆に接続していると判明。
通常電源はS(ソース)側に、モーターはD(ドレイン)側に接続しますが、これを逆にしていたようなのです。そりゃ動かんわ・・・というか、生きてるのか!?Σ( ̄▽ ̄ ) 火を入れる時、動かなければすぐ電源を落としていましたけど、どうなんですかねぇ。
▼最初の試作回路


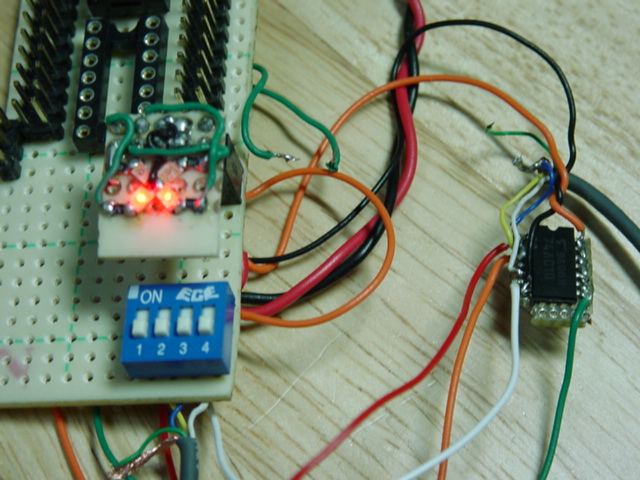
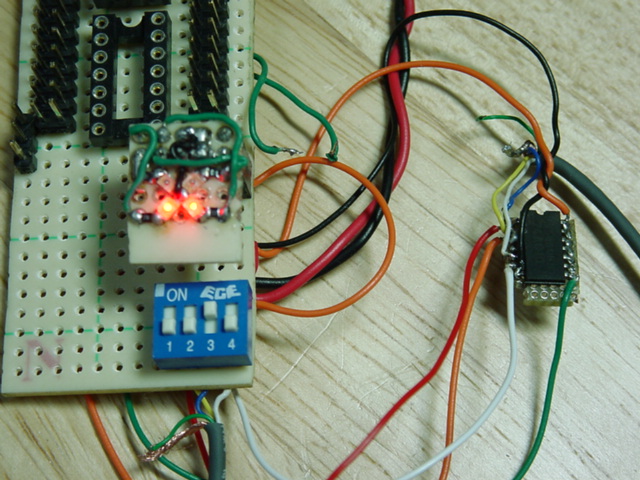
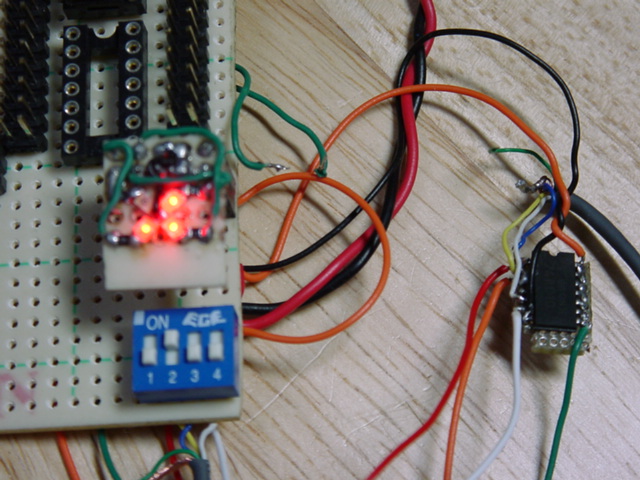
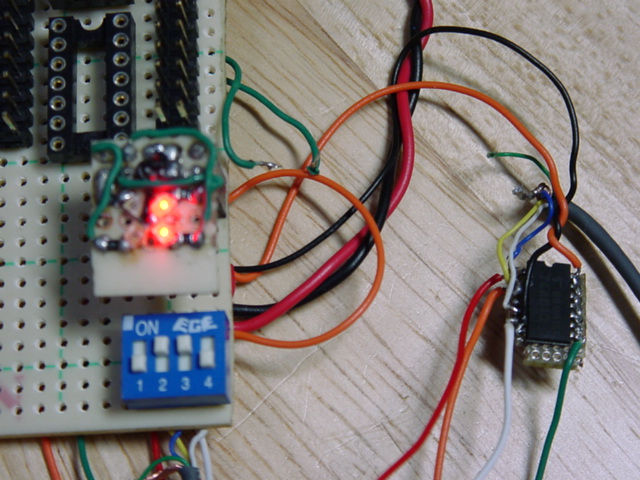
はい。最初に稼動した試作モータドライブ回路とオペアンプです。回路は宮田さんの
FETでモータドライバに記載されている回路の2SK1132のG(ゲート)より、2SK2231へ伸びている線を切断し、この切断してフリーになった配線をもう一つの入力として使用するというものです。
Pchの2SJ377は、2SK1132を介して間接的に操作、Nchの2SK2231はマイコンのI/Oポート(PWM)に接続して直接操作するというものです。これがいいのか悪いのかは、あんまり分かりませんが、この記事でやってることと大して変わらないので問題ないと思い、この方法を使用。
さて、このままではH8/3664では1個しかサーボを操作できません。今回もやりました。俺サーボ化の救世主、ロジックICです。やはりこれがなければ始まりませんね。(^-^;
▼LOW-SIDE PWM制御をPWM一本で行う
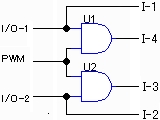
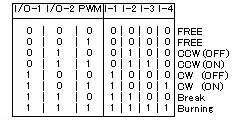
回路図と真理値表です。(これ作るのに1時間掛かってしまった。(-_-||| ) バーニングしてしまうリスクはあるものの、それさえ気をつければ問題ありません。
1つのRCサーボにつき、AND回路が2回路あればいいので、H8/3664TINYを使うならば、PWMが3個なので、6個あればOKです。さらに通信にAND回路が2回路必要なので、合計8個。これがなんと、ちょうどロジックIC2個分なんですよね。
試作1号機にはこれを使いました。動きも目論見通りでした。うん、いい感じだ。
▼フィルタ
前回はサボっていた、ノイズ対策を今回やってみました。まずはポテンショメータにオペアンプを付けるというもの。使ったのはLMC662という8PINタイプ。レール-トゥ-レールというものらしく、オペアンプに繋いでいる電源の電圧まで行ってくれるとか(余り良く分かっていない人)。
これは結構面倒なもので、入力電圧は2.5V以下でないと出力される値がおかしくなってしまうのです。入力端子はレール-トゥ-レールじゃないのね・・・(T-T)。そんな訳で、ポテンショメータの信号を抵抗器で1/2に分圧し、それを二倍にするという面倒な作業をする。
これで問題ないはず・・・と思ったが、A/Dで取り込んだ値が変。で、調べた結果、330Ωで分圧したのが原因だったようです。そりゃ、変わりますよ・・・。と、言う訳で、10KΩに交換したら問題なく動作。しかし、ポテンショメータから直接取っていないので、多少減ってます。
さて、この状態で平均化して値を見てみると、値がほとんど変動しません。456と表示されたらずっと456のまま。前回までは値がフラフラと±2(A/D値)くらい変動していたのに、ピタッと止まってるんです。たまに変動しますが、それも±1くらい。
効果絶大です!さらに、A/Dポートの直前にRCローパスフィルタを組むとさらに変動が少なくなります。残念ながらH8/3664TINYは、A/Dの電源がボード上でVccに接続されており、コネクタの方には出てないので、この対策はできませんでした。しかしながら、その効果は絶大です。
▼PIDの方は・・・
前回より、ゲインは高くできるし、調整しやすくなりました。保持力も前回よりUPしています。しかし、I(積分)の調整がなかなかうまくいかず、保持力はあまり上がらず。PD制御ならば、保持力はKRS-2346ICS(保持トルク最大設定と比較)くらいは出せるようです(ロボコンマガジンより)。
P(比例)とD(微分)のゲインだけで調整していくと、やがて振動が・・・。90°から0°へ行くという実験をしていますが、移動して止まる時は問題ないのですが、0°の時にちょっとした振動を与えると、収束せずに振動しっぱなし。
世間では有名なプルプル現象っぽいです。体験したのは初めて。ちょっとした振動なので、この振動がロボットの体を伝わればさぞかし素晴らしいプルプル現象が見れただろう。なかなかに難しい。
ちなみに、2174FETの通常ギアバージョンです。む?ならばハイパーギアならもう少し行けるのかな?で、Iが上がらないのでカンファレンス資料にある「ゲインが上がらない場合は現在位置の取り込み方法を見直すべし」の言葉に従い、平均化に注目しました。というのも、32個の値を平均化しており、値の変化が遅いので8個に変更。
すると、ノイズの影響が現れ始めたので、明らかなノイズらしきデータを削除するプログラムを加えようとする。この作業中にショートしたらしく、タイニー死亡。実験中断。う~む
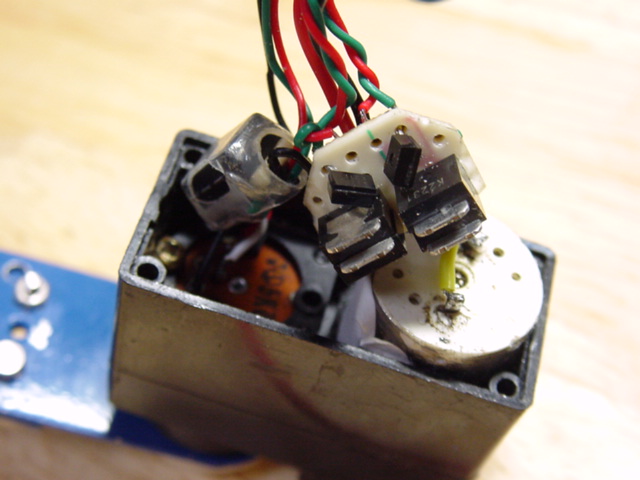
▼大きさとか
大きさは、上の写真を見ていただければ分かる通り、ケースに収まります。ところが、今まで製作した私のロボットはケースの蓋を省いた状態でロボットが構成されています。
つまり、現在の設計ではこれらFETを搭載するのは不可能なのです。それと、今回の設計はメンテナンス性に気を取られすぎ、剛性が最悪でした。再設計・・・避けて通れない道になりそうです。まぁ、俺サーボが動かなくとも、通常の制御基板は小さいので、設計の変更をせずに動かす事が可能ですね。
▼停止
朝の月曜日に更新しようとしたら、CGI、FTPなどがメンテナンスのために10月8日まで停止することになっていた。更新を再開していた時期だったので、間の悪い事。(-o-)
さらに、アップロードするのも前より格段に悪い。まだ調整中なのだろうか?そう思うことにする。
▼対策強化
今回、TINYがバーニングしたのに伴い、新型の制御基板を作る事にしました。小信号用FETのPchを2個増やし、合計で8個のFETを使うHブリッジを作ります。で、AND回路だけで動かそうと考えた時、おかしいと感じたのです。
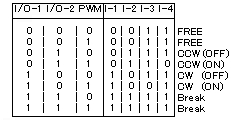
今までは制御信号を受け取るFETが全てNchだったため、Highになるとバーニングでした。しかし、今回の真理値表は次の通りです。
▼1,1,0,0でバーニング(他でもバーニング)
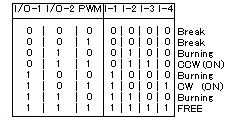
貫通電流の流れるモードが多すぎて、
話になりません!このまま使えばFETの寿命は確実に縮まるし、燃えますねきっと。
こんなん使えるかー!\(>□< )
そんな訳で、昨日は図書館で論理回路の参考書と、ロジックICの規格表と睨めっこ。3時間ほど「あーでもない、こーでもない」と一人で奮闘していました。そして、ついに行き着いたのです。どんな信号でもバーニングしない、論理回路の組み合わせを!
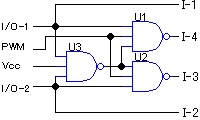
▼新しいHブリッジ制御回路
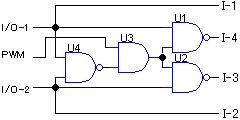
ちょっと内容が複雑に見えるかもしれませんが、動作は単純です。U1とU2だけに注目してください。U3からの出力をPWMと仮定すれば、何の事は無い前回のAND回路の反転バージョンなだけなのです。
じゃぁ、残りのU3とU4は何なのか。それは前回「1,1,1,1」でバーニングするという問題がありましたが、これを改善するものなのです。
このバーニングする問題はなにかと考えた時、I/O-1とI/O-2が同時に1(High)になった時に、PWMが1(High)になったら燃えるということでした。
ならば、I/O-1とI/O-2が1(High)の時はPWMを0(Low)にすれば、問題は解決するわけです。そこで今回、NAND回路の習性である、入力信号が「1,1」の時だけ、出力が0(Low)になるという点に着目しました。
U4の出力が0(Low)となれば、U3のAND回路の出力は常に0(Low)になります。出力が0(Low)ということは、PWM信号はここで通行止めという訳です。よって、バーニングモードはブレーキモードになり、めでたしめでたし。
▼てくにかるかんふぁれんす
大学のゼミが、午前中から午後にかけてあり、行けず。(T▽T)懇親会もお金を払っていないから行けず。(>-<)か・・・かなしい。初めての欠席である。いかん!モチベーションが上がらんでは無いかっ!放電しっ放しでそろそろやばいかもなぁ。むむぅ~。
▼んで・・・
今回から改名したハタちゃんからメールが来る。「カンファレンス来ないの?」うぅ・・・いけないんですぅ。二次会なら行けると返信。結局行く事にしました。まぁ、仕度とかあったんで、出たのは8時10分過ぎかな。
3次会になるんじゃないか?という状況下で、川崎に降下したのであった。(って、あんたどこから降ってきてるんだ)
▼毎度の事
毎度のことであるが、何か動かそうとすると、コネクタ忘れたり、電源忘れたりとあり、結局動かせないが、今回もまた同じ。変換用の電源コネクタを、忘れてきました。(T▽T)しかぁ~し!今回は試作5号機がそのピンチを救ってくれたのであった。
マイコン用の9Vバッテリーのコネクタがちょうど良いコネクタであり、そのまま接続!俺サーボ起動!良かった良かった。
▼えまのんさんにいろいろ指摘され
俺サーボで行き詰まり感があったのですが、その打開策、不安な事などをお聞きし、また教えてくださったのである程度方針が立ちました。一番の収穫です。この場をお借りして御礼申し上げます。ありがとうございました!
これで、市販のデジタルサーボを越えられれば、かなりハッピー。とりあえず、また歩行試験型を作ってみようと思います。また制御方法が変わる・・・かな。
▼公開時期を外した。
実は、いろいろと公開しようと考えていたら、公開し忘れてそのまんまになってしまったものがいくつかあったので、載せますね。数点ほど。(^-^;
最近、ちと忙しいのが難点。でも、トクトクがようやく表示されたので良い機会なので更新、更新。
▼カレイナット
今回のWegweiser二号機(未完成)の胴体ですが、ネジを締め緩めと何度かやっているうちにネジ穴が馬鹿になってきてしまいました。そろそろ限界です。困った困った。という訳で登場のカレイナットです。
このナットの存在を知っている方もいるかと思います。このナット、アルミ板に圧入することで、アルミ板に固定できます。外れません。
謎の声A「それなら何でやらなかったんや?」
謎の声B「ふふふ、それはですね奥さん。あの人、おバカだから下穴の空け方間違えてたんだと。」
謎の声A「あー、それで今までずれるとか、精度が当てにならないなんておバカな叫びをしてたんだ。ぷぷ」
謎の声B「ナイスボケ。いいぞ~もっとやれ~」
・・・
グサグサッ
(事実なので言い返せず)まぁ、ともかくそういうことです。はい。
今後忘れないためにも、詳細を下記に記載しておきます。
▼カレイナット「圧入方法」


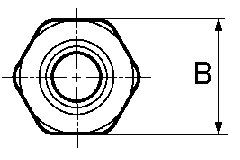
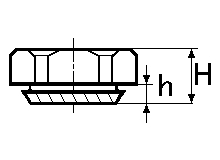
まず、φ4.5(穴径4.5mm)を空けます。今回使うのはM3(3ミリネジ)を使うので、この大きさでOKです。で、これを圧入するのには、M3のステンレスキャップ(六角形の穴のネジ)を使います。十字ネジは決して使ってはいけません。最悪の場合、頭が潰れてネジが回らなくなります。(^-^;


工具はこの六角レンチを使います。六角レンチは100円ショップでも売っています。なければホームセンターか、工具専門店へ行きましょう。手に入らない事はないと思います。
さて、工具も揃ったらいよいよ圧入ですね。多少力がいりますけど、疲れるほどでもないんで大丈夫です。


写真のようにセットしてください。左の写真ではネジは裏の方についています。このときカレイナットを逆さに取り付けないように。(そんな人いないって)ちなみに私は、ネジとアルミ板の間に平ワッシャーを二枚挟んでいます。多少まわしやすいかな?で、六角レンチを右の写真のように挿したら、準備完了!


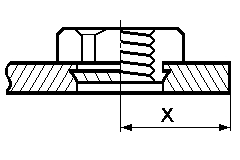
回らなくなるまで回しましょう。と言っても、回しすぎると頭が潰れるので回しすぎてもダメです。目安は、アルミ板にナットがくっついているような状態に見えれば、それでOKです。何回かやるうちに圧入し終わったかどうか分かってきます。
右の写真のようになっていれば完成です。なかなかに強力です。これであなたのロボットもメンテナンス性がアップ!
▼カレイナット「入手篇」
さて、問題のカレイナットはどこにあるんですかねぇ。秋葉原のネジ西川でもM3以上しか取り扱っていない(と思う)です。M2が欲しい場合は困りますよね。で、ネットを探していたら、この店で売ってました。
ノナカ金物店
すぐカレイナットの注文をしたい方はこちら ⇒
カレイナット(お取り寄せ商品)
100個単位で購入できます。注文してから届くまで若干かかりますので、必要な時はすぐ頼みましょう。
▼終わらない課題(レポート)/通らない実験レポート/進まない俺サーボ
今週はなぜか忙しい。(先週もだっけ?)先週あった機械工学実験演習のレポートと、今週あった機械工学実験演習のレポートと、航空宇宙工学のレポートと、プログラミング演習のレポートと、メカトロニクスのレポートと、ゼミの課題と・・・
(ノ≧ロ)ノ<うがぁああああ~~~~~~~~~~っ!
ちなみに、終わったのは航空宇宙工学とプログラミング演習(FORTRAN)だけである。しかも、今日医用機械工学2からレポート出たし・・・。うへぇ(T▽T)
▼プログラミング演習
ちなみにどんなプログラムかというと、行列の階数を求めるプログラム。ガウスの消去法は先週出た課題を完成されているので問題ない。あとは階数求めるだけ。簡単なはず。
が、実際はスパッと終わらず。ほぼ単純なバグが連発し、それらで時間を喰われた。疲れてるのかな。22時でコンピュータ室が閉まってしまうので、そこで粘ってプログラミングを完成させた。
それにしても汚い、納得いかない!でも提出は明日の朝9時だったりするので文句を言えず、時間も終了。終わった。(いろいろな意味で)
計算結果は、問題ないですよ。(^-^)
▼通らない実験レポ
再三レポートを修正するも、毎回担当のTAさんが変わるので、毎回違う場所を指摘され終わらず。普通なら先生が見るんですが、一体どちらへ?
これはこれで、明日には提出できそう・・・かな?次は、今週あった実験のレポートを月曜日までにつくらにゃ。C= (-。- ) フゥー
前期は2週間ごとに実験がやってきたのですが、後期は1グループ分実験を落としたみたいで(11名ほど)、1週間ごとのサイクルに。(-_- )ロボットやってる暇じゃなかったり。ちなみに、「実験を落とす=留年決定」です。
▼進まない俺サーボ
上記の理由からぜ~んぜ~ん進みません。えまのんさんのアドバイスである、実験装置作りたいのに・・・時間がねぇ~。やばいっす。日記書いたら1時間なんて飛びます飛びます。ひゅ~ん(壊)
更新することがなかったので・・・というより資料作ってる時間がないので、今回は近況なんぞを(愚痴か?)
近日中に、現在使ってるオペアンプとか取り上げたいですな。まぁ、土日くらいにできたら・・・。(^-^;
▼彼は、田町にいます。
今日某所で飲み会があったらしい。ピピッと電波をキャッチ。いいですな~・・・楽しそうで・・・(-_-)
自宅でウィスキーでも・・・って、そりゃウーロン茶じゃ!(注:ウィスキーなんて飲めません)
田町って都心だけど、ある条件を当てはめると、田舎になる。(条件はひ・み・つ)
業務連絡:某DVDはいつできるんじゃ?(伝わる可能性、1.0x10-12)
▼おれさ~ぼ
毎日レポート三昧でうんざりしてたので、少し早めに撤収し測定用のフレーム作り・・・が、なんかおかしい。折り曲げて出来たものを組み合わせると、なぜか幅が1mm長くなっている。今まで通りやっていたつもりだったが、実際はおかしいようだ。
っと、言う事は今までの加工精度が悪かったんじゃん!今思えば、胴体の組み上げの時にちょっとサイズがおかしかった。強引に組み上げてしまったようだ。う~ん、反省o(_ _ )
ちなみに新たに作り直したパーツは、幅が実際より0.5mm短い。むー、難しい。(進んでないぞ~)
▼すぺしゃる
そういえば、今回エントリーしてない。というか、モノが完成してないんだから当たり前。当日控え室には行けないよね。なんか悲しい。大会はその分、観客として見れるけど・・・。
またしても駄文で終わるのであった・・・。
ん?そういえば文字だけの更新だとそんなに時間喰われないな。Σ(- -ノ)ノ エェ!?
▼新潟地震
昨日家に帰ってきたら、ドアがバタバタと音を立てていました。風も吹いていない(窓を開けてた場合、風が家の中を吹き抜けてドアが開くことがある)のにおかしいなと、思っていたら母親がドアを開けに出現。立ち止まったら、揺れてる揺れてる。
中に入った後も、しばらく経つと余震が・・・。今まで感じた中では最高かも・・・。今日は死傷者がどんどん増えていきますね。これ以上増えないで、欲しいものです。やはり台風の影響とかで地盤が緩んでいるせいか、土砂崩れが目立ちますね。今年はいろいろと災難続き・・・。とかげ24匹目・・・来るなよ~。
▼これって地震雲?

地震が発生するちょうど1週間前の夕方の風景。富士山は自宅から西南の方向にあります。この雲の異常な境界線はこのまま右の方へ伸びていた気がします。うちでは地震雲、地震雲と言ってましたけど、どうなんですかねぇ。
右側撮り忘れた。東工大の工大祭の帰り際(17時頃)に、木の上の大量の鳥が喚いていたけど、関係ないよなぁ・・・う~む。
[BACK]
[TOP]
[NEXT]
Copyright (C) 2004 U-hirohito All rights reserved.

 はい。最初に稼動した試作モータドライブ回路とオペアンプです。回路は宮田さんのFETでモータドライバに記載されている回路の2SK1132のG(ゲート)より、2SK2231へ伸びている線を切断し、この切断してフリーになった配線をもう一つの入力として使用するというものです。
はい。最初に稼動した試作モータドライブ回路とオペアンプです。回路は宮田さんのFETでモータドライバに記載されている回路の2SK1132のG(ゲート)より、2SK2231へ伸びている線を切断し、この切断してフリーになった配線をもう一つの入力として使用するというものです。