▼久方ぶりに更新だ。
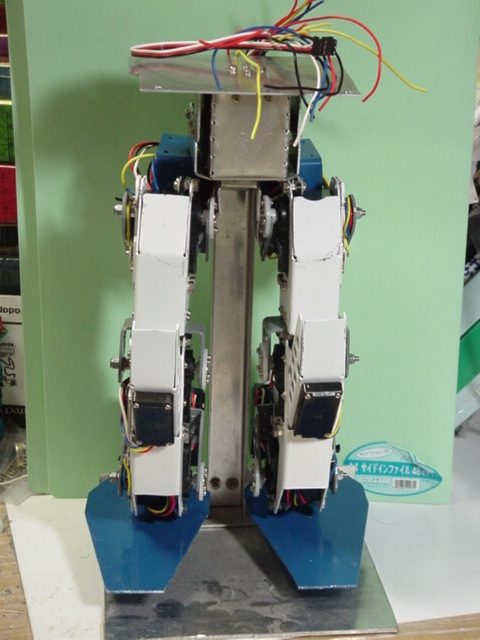
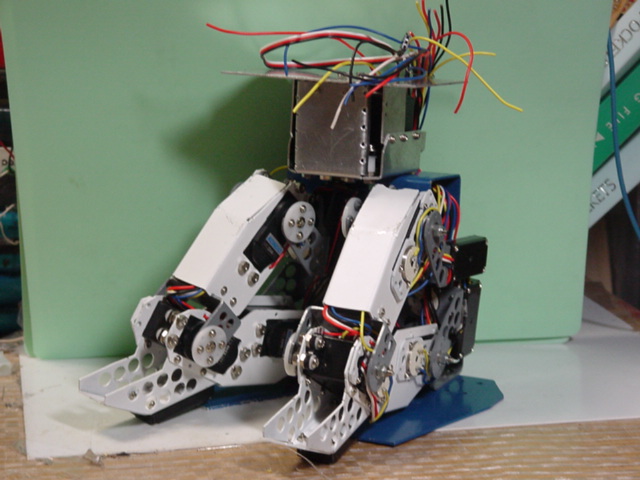
 ようやく公開できる程度に進行致しました。土曜日で右足。今日で左足を組み終えました。配線も残すところコネクタの作成のみと言った感じです。コネクタさえ完成すれば、動かせると思います。
ようやく公開できる程度に進行致しました。土曜日で右足。今日で左足を組み終えました。配線も残すところコネクタの作成のみと言った感じです。コネクタさえ完成すれば、動かせると思います。歩行試験型ということで、まともな歩行ができるようにしばらく頑張ってみるつもりです。とりあえず、目標は12/6かな・・・。無線とバッテリー・・・間に合うかな。
で、お気づきの方もいると思いますが、初めて塗装をやってみました。(足のみ)
色は青と白と灰色です。上半身もこの色でいこうかと思います。しかし、作っている本人が言うのもなんですが、アレっぽいデザインになってるよなぁ・・・。
ちなみに、スタンドは試作3号機時代に使っていたものです。背が高くなっていると思っていたけれど、3号機の方が高かったみたいですね。(足が浮いております。)
▼直行部分
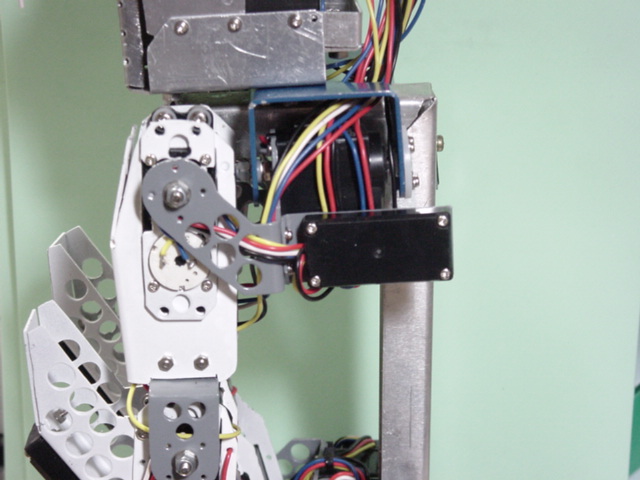
 配線がちょっと邪魔かもしれませんが、直行部分の拡大写真です。今回、工夫した部分でもあり、失敗する可能性も捨てきれない場所でもあったりします。この方法やられている方っていますかね?
配線がちょっと邪魔かもしれませんが、直行部分の拡大写真です。今回、工夫した部分でもあり、失敗する可能性も捨てきれない場所でもあったりします。この方法やられている方っていますかね?ちなみにこの写真は腰の部分で-30°〜+90°と言った感じです。足首の方は-90°〜90°まで稼動することができます。(ヨー軸)今までより稼動範囲は広い方かもしれません。
▼屈伸
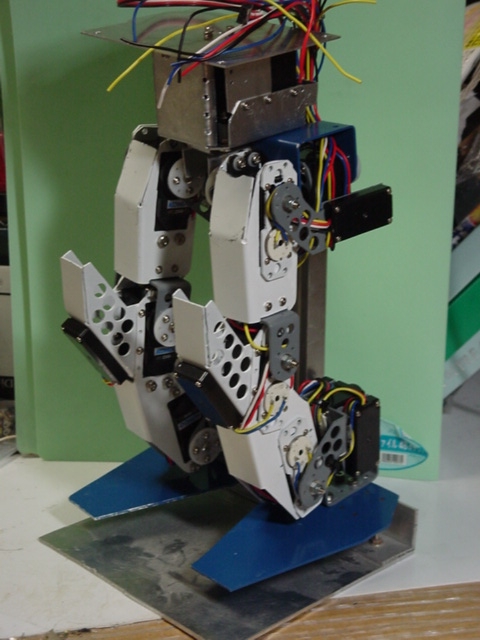
 今まで通りにこのくらい屈伸が可能です。もう一枚の写真は試作4号機のです。一応デザインは継承しているっぽいですね。今回の5号機は、配線も大分綺麗になりました。4号機の時はひどかった・・・。
今まで通りにこのくらい屈伸が可能です。もう一枚の写真は試作4号機のです。一応デザインは継承しているっぽいですね。今回の5号機は、配線も大分綺麗になりました。4号機の時はひどかった・・・。
▼おまけ
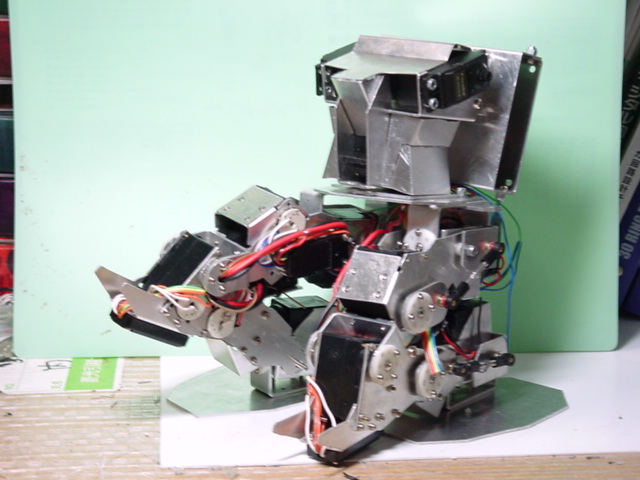
で、稼動範囲の広さを証明した写真を・・・。こんなことするかどうかは分かりませんが、一応こんなことができますと。足を巧みに動かし、相手に絡みつき行動不能にさせます・・・なんて。(笑)
さて、今回はちゃんと動いてくれるんでしょうか。近日中にその模様を公開。(動かすので)
まぁ、動かなかったら悪戦苦闘ぶりを公開???
