▼ROBO-ONE テクニカルカンファレンス
歩くと信じて、開発したWegweiser試作4号機が歩けずに終わったあの大会から約3ヶ月。最近オレサーボばかりやっている自分。ロボットを作っていなかったので、ややテンションが降下気味。
とりあえず、毎度カンファレンスでは、みなさん色々な物を持ってきて見せて頂けるので、今回は自分もオレサーボを持って行くことにしました。なので、前日に最終調整をやっておりました。そして、就寝・・・。(まさか、このことが裏目に出るとは・・・)
カンファレンス当日。起きた自分。目覚し時計を見る・・・時計は11時を指していた。
がーーーーん
「な・・・なんですとぉ〜〜〜!!」
どうやら、前日のバイトと、夜遅くまで調整をしていたのが効いたらしい。
「早く寝ればよかった・・・」
かなり後悔。
仕方がないので、休み時間を狙い出発。なんとか、前の方の席の確保に成功。前半が終わってしまったのが非常に悔しいが、手遅れである。そして、後半の講義が始まる。講義を聞いているだけで、やる気がかな〜りUP!早く帰って設計したい気分にまでなる。強力だ。
カンファレンス終了後、宮田さんのバーニング君を見せてもらい、触らせてもらった。足の関節がスムーズなこと!さすがマクソンモーター!!(やる気UP)
そして、宮田さんにONOさんを紹介してもらう。前々からお会いしたかったのだ。今度じっくり話したいなぁ。
さあ、いよいよ懇親会の始まりだぁ〜!!さらにやる気を充電すべく、戦場へと向かう。
そして〜!今まで頑張ってきたオレサーボが唸りを上げるぅぅぅぅ・・・はずだったのですが。
「なんで、動かないんじゃ〜〜!!」
「○○は飼い主に似るとは言うが、オレサーボも似るんかぁ〜〜〜!!(本番に弱い。)」

仕方ないので、カバンをあさっていると、前に試作したRCサーボ(ギア減速機能付)があったので出してみる。すると、意外にもこちらの方が人気だったりする。前からやってみたかった、RCサーボの出力をギアで減速するというのを作ったのだけど、意外と動きが良かったので、人気が出たようだ。
うむ、予想外の出来事は起こるものだなぁ・・・。
そんな感じで1次会は過ぎ、2次会へと舞台を移す。二次会では、MAGIの製作者、ZIPPONさんに色々とお話を聞かせてもらった。ZIPPONさん曰く、どの部品が何グラムか頭に入っているのだそうだ。う〜む凄い!
さらに、ロボットも全身カーボンで作られており、さらに徹底した肉抜きがされていた。次回大会での活躍が凄く楽しみである。
そして懇親会は終わった。有る意味、衝撃的な一日だった気がする。終わってみると、かなりのやる気が充電されたのが分かる。(満充電か!?)ようやく、夏の大会のショックから立ち直ったようだ。(おそっ)
というわけで、まずは12/6に萩原さんが練習試合みたいなことをされるようなので、足だけでも完成させて持っていくのを目標にすることにした。今回は確実に歩くようにしてから上半身を作ることにする。
仮に完成せずとも、去年よりはスケジュール的に早いはずだ。去年はなんだかんだで、翌年にプログラムをしていたような記憶があるし・・・。
ともかく、もう歩かない機体は作りたくない・・・。(同じ失敗は、ここで止めることにしよう。)
▼Wegweiser試作5号機計画開始

足の設計も終わったので、さっそく製作。カンファレンスの刺激もあり、カンファレンス以前にも足に関しては2度設計している。なので、今回はver.3の設計を使うこと事にした。
今回の5号機の設計は大幅に見直すことにした。
・3号機、4号機で使用したタイロッドは、あまりよろしくないので(稼動範囲があまり広くない)今回は採用しなかった。
・1号機、2号機のようにRCサーボ2つを直行させて、箱型のユニットとして使うのも考えたが、(YDHに使われている直行部分にあるRCサーボのような配置)、それとは別の方法を考えたので、それで行ってみる。失敗しても、今ならばまだ間に合うのだ。
・そして、4号機で大きな問題になったメンテナンス性も考慮した。このメンテナンス性事態は、カンファレンスで持っていった、ギアで減速したRCサーボで散々考えた方法を使っている。
・パーツ数の削減も考えてみた。前回の4号機は足だけのパーツ数は50だったのに対し、今回は34パーツなので、なんとか削減できている。
ただ、少し気がかりなのは腰部分が足よりも後ろにある事。腕が、足の上に来るかどうかは、これからの設計次第。
ただ、まだ電装系の取り付けが今一はっきりしていないので、それらの要因により、追加パーツ、または作り直しのパーツが出る可能性がある。とりあえず、歩く所まで持っていき、改良しようと考えているけど、どうなることやら・・・

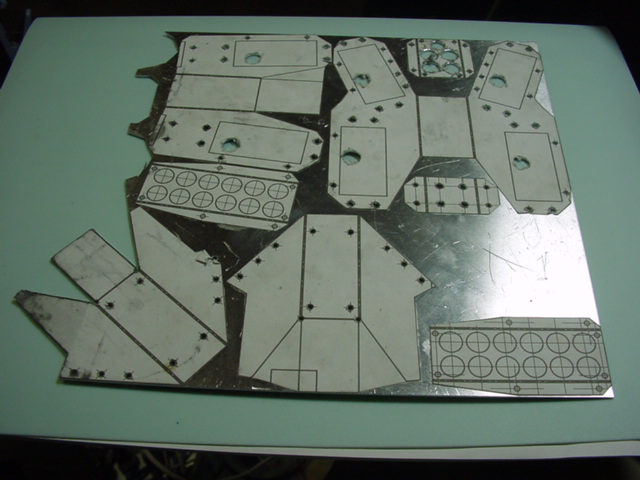
長くなりましたが、今日できたパーツは4個!、内1個は折り曲げがまだです。まだ穴あけと切り出しを待っているパーツがそこそこありますね。これらのパーツはアルミの厚さ1mmです。
しかし、真に恐ろしいのは2mm厚の方かも・・・あの穴の数・・・考えたくない。(ジョイント関連です。)形も、単純な形ではありません
▼加工〜かっこう〜〜がーーーん(意味不明)
という訳で、(どういう訳だ?)製作二日目突入です。しかし、今回は時間が取れず、加工時間1時間30分程。もったいないので、サクサク行きます。まず、昨日の板の穴あけが終わっていない部分を空けました。
穴あけは、楽で良いなぁ・・・数が多いのが難点ではあるが・・・。続いて、切り出し!5パーツ切り出せました。この辺りで、1時間程消費したので、トドメの折り曲げです。
▼曲げ曲げ折り曲げ〜

クネクネ曲げます。サクッと大きいパーツ(2個)の折り曲げが完了します。(4号機で取り付けた、ひざのアレは健在だったりする。)外すのも容易なので、悪影響を与えるようならば、外すしかないですけど、果たして!?
続いて軽量化した小物パーツの折り曲げ!しかし、ここで予想してなかった出来事がっ!!肉抜き用の穴を予め空けておいてしまったため、強度が下がり狙った位置に折り曲げができない!
「なっ・・・なんだとぉ〜〜〜!!」
穴の数が多かっただけに、ショック!(ちなみに失敗したパーツは、写真下の3パーツです。)
「この時点で、ユウさんの希望している折り曲げができなかったため、作り直しが決定です。」
「い・・・いやだぁ〜〜〜〜〜(ぉぃ)」
仕方ないので、作り直すしかない。むー前にもこんなことがあったような・・・。慣れない事をするとこんなものなのだろう。良い意味で考えれば、小さいパーツで助かったとも言えるだろう。そう思うことにして、明日の作業用の図面を印刷する。
で、ひざ辺りのアルミの塊がそこそこ重いので、こいつも肉抜きした方が良さそうだ。肉抜きの穴は精度が必要ないので、加工したアルミの上に紙を張ってやろうと思う。問題はうまくポンチ打ちができるか・・・明日全てが明らかになる。(笑)
▼先週のあらすじ...
さて、先週は土曜日にも加工の続きをやる予定でしたが、無理をしすぎたせいか爆睡してました。仕方ないので、土日は腰の設計&俺サーボの調整。
【俺サーボは・・・?】
オペアンプを取り外し、ソフトでなんとかできないかチャレンジしてみたのですが、結局ダメ。やはりDゲインが高すぎるため、ポテンショメータがわずかに変動しただけでも敏感に反応してしまうようです。
一応Dゲインを少なめに設定した状態であれば、問題はなくなります。しかし、そうなるとPやIのゲインも少なめに設定するので、目標値付近になかなか行きません。大体2°くらいずれた所で停止しています。Dゲインを上げずに、PやIのゲインを多高くすると、オーバーシュートをしやすくなり、2,3度振動してから停止します。ひどい時は振動がかなり長く続くことも・・・。
対策としては、もう一度各ゲインをじっくりと調整するのと、ちゃんと動作するオペアンプを搭載することでしょうか・・・。
オペアンプは先日、宮田さんがBBSに書き込んでくださり、変な挙動は解消しそうです。A/Dコンバータ手前にローパスフィルタをつけておくと結構いいらしいことも言われていました。カンファレンスでお聞きしたときは、抵抗1KΩ、コンデンサー1μFを使っておられると聞いたような気がしますが、抵抗の値が10KΩだったか1KΩだったかちょっと忘れてしまっています。
・・・・・・
・・・・・・
てか、あらすじになってないし・・・それ以前に土日の日記じゃないかぁ〜。
▼腰パーツの印刷完了!作るか。
というわけで、土曜日にやるはずだった作業は今日まとめてやりました。それと昨日やっと腰パーツの設計が完成したのと、修正パーツがあるのでそれらを印刷しました。修正パーツは、本来1パーツでできる予定だったのですが、1パーツ構成にするメリットもなく、2パーツ構成にした方が、変な折り曲げをする必要がなかったので、2パーツ構成に変更したパーツです。
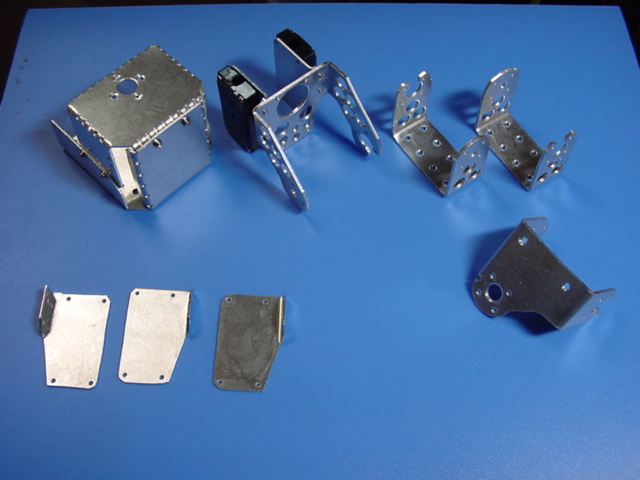
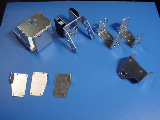
で、今日はなかなか加工スピードが上がっていたようで、サクサクと作業が進みました。(単に、穴の数が少なかった・・・とも言える。)前回の2mm厚のパーツも全部切り出しました。
が、ミス発見!裏表逆に印刷していたパーツが紛れていたため、作り直しをせざるおえない状況になりました。まぁ、1パーツだからどうってことないはず。
※写真右側3パーツが2mm厚パーツ(アルミ板に残っていた全パーツ)
▼新たなる試み【折り曲げ】

今回の腰パーツでは新たなる試みをやってみました。実は、この折り曲げ、カンファレンスの時にOMNIHEADを見て、思いついたのです。前田さん曰く、軽量化のために空けた穴だったそうです。」
それは、折り曲げる前に、折り曲げる線上に穴を空け、折り曲げ機を使わずともそこそこ精度が出せる折り曲げ方法です。実践してみた結果、意外と精度が出ているような気がします。少なくとも、強度を上げるための折り曲げなど、精度を出さなくても良い部分には使えそうです。
精度の面もあまり良いとは言えないと同時に、強度も落ちるため、【強度を上げるための折り曲げ】以外で行うと、金属疲労で壊れる可能性もあります。そうなると悲劇。今回は、1mm厚のパーツに2mmの穴を空けて試しましたが、2mm厚などではやりたいという気が起こりません。
▼直行軸に使用するパーツ

修正パーツとは、写真下の方にある板に2枚の事です。ここにRCサーボの基板とフタを取り付けます。今回、俺サーボも平行して進めていますが、12/6に間に合わない・・・というのと、設計が間に合わない(ROBO-ONEではない)、TINYが意外とスペース取る(設計にも影響)、RC用基板を使った最後のあがき・・・というのがあります。1号機、2号機、3号機、4号機・・・全てRCサーボについている基板で動作させていましたが、かろうじて歩いたのは3号機のみ。
今までの機体には成仏してもらえるよう、今回の5号機で歩かせようと思います。俺サーボは今年度中に完成するか、RCサーボの基板がやはりダメだった場合に、完全に搭載します。
いずれにせよ、現在のRCサーボの基板よりも、俺サーボの方が色々できるので、こちらの方が面白いし、いずれこちらに移行しなければならない日が必ず訪れると考えているので、がんばってこっちの開発もやらないと〜。
気が付いてみれば、11月も2/3終わっていた。次の連休が勝負だなぁ・・・。
▼久方ぶりに更新だ。


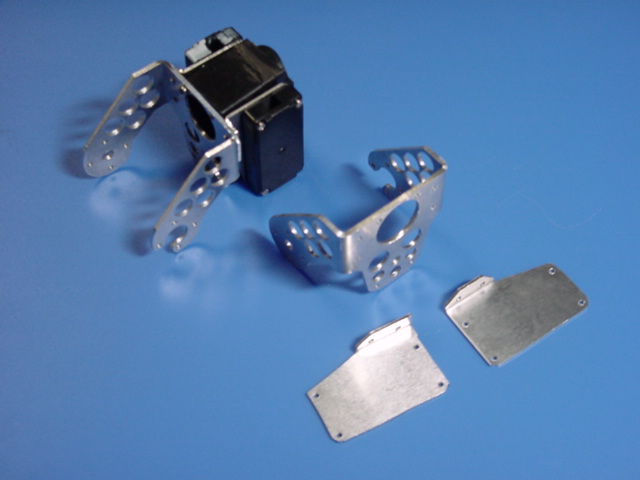
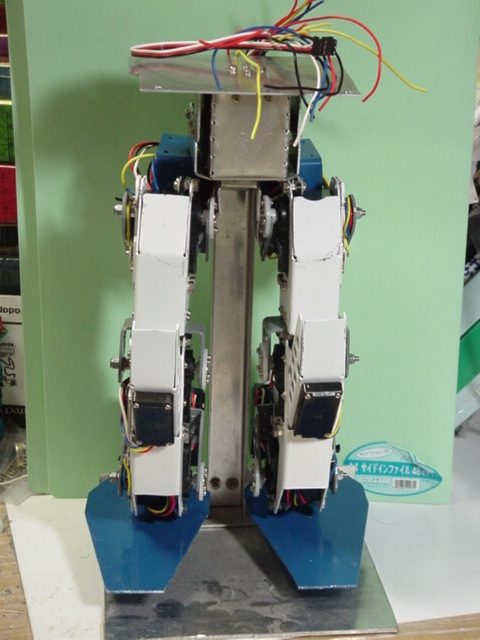
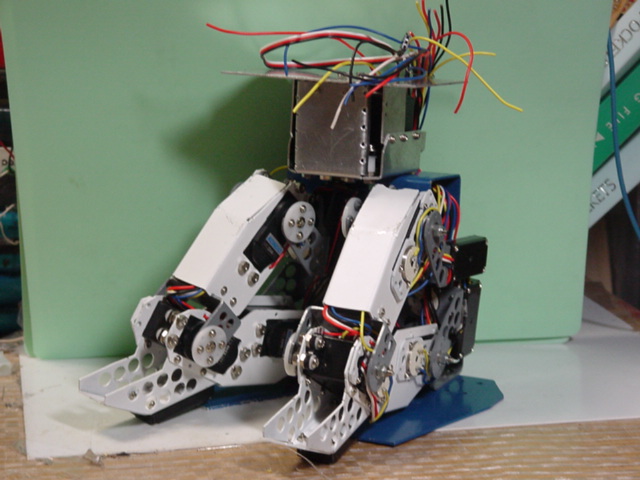
ようやく公開できる程度に進行致しました。土曜日で右足。今日で左足を組み終えました。配線も残すところコネクタの作成のみと言った感じです。コネクタさえ完成すれば、動かせると思います。
歩行試験型ということで、まともな歩行ができるようにしばらく頑張ってみるつもりです。とりあえず、目標は12/6かな・・・。無線とバッテリー・・・間に合うかな。
で、お気づきの方もいると思いますが、初めて塗装をやってみました。(足のみ)
色は青と白と灰色です。上半身もこの色でいこうかと思います。しかし、作っている本人が言うのもなんですが、アレっぽいデザインになってるよなぁ・・・。
ちなみに、スタンドは試作3号機時代に使っていたものです。背が高くなっていると思っていたけれど、3号機の方が高かったみたいですね。(足が浮いております。)
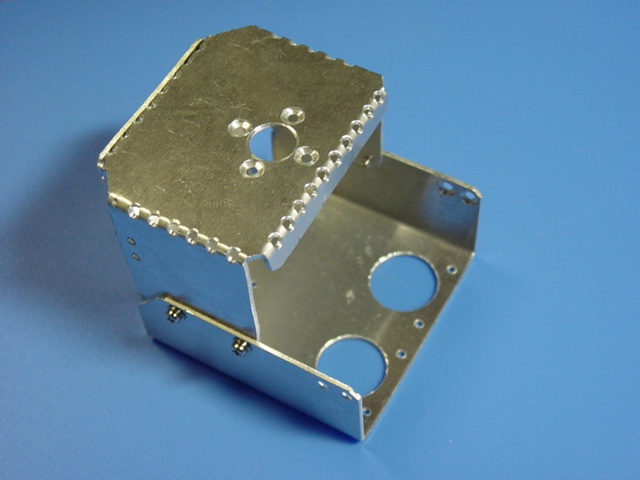
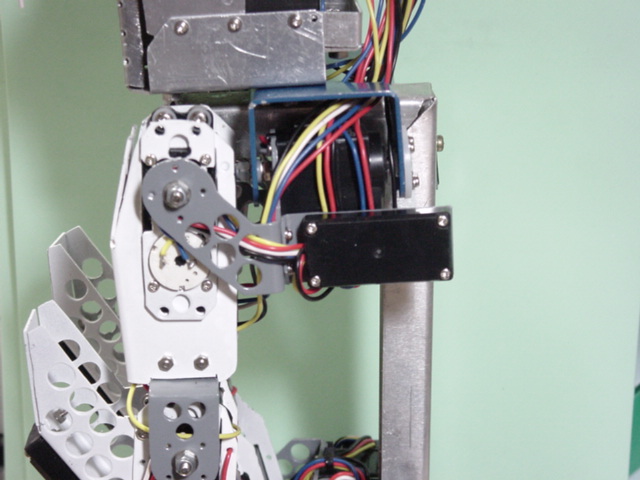
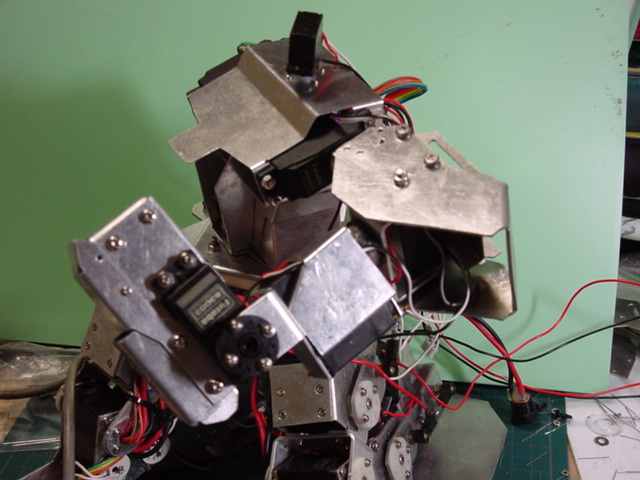
▼直行部分
配線がちょっと邪魔かもしれませんが、直行部分の拡大写真です。今回、工夫した部分でもあり、失敗する可能性も捨てきれない場所でもあったりします。この方法やられている方っていますかね?
ちなみにこの写真は腰の部分で-30°〜+90°と言った感じです。足首の方は-90°〜90°まで稼動することができます。(ヨー軸)今までより稼動範囲は広い方かもしれません。
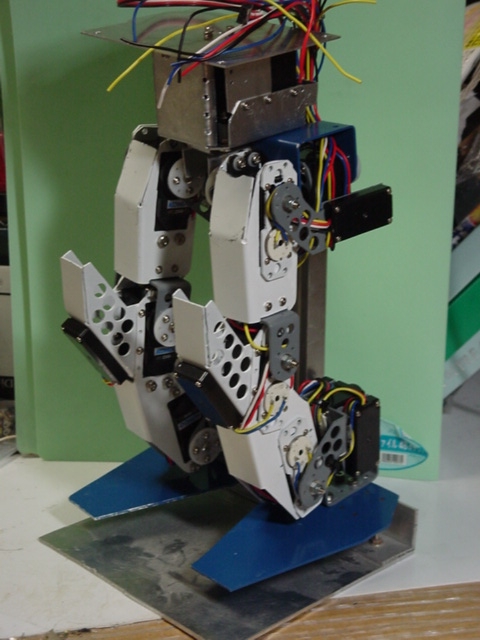
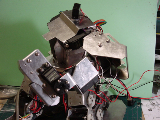
▼屈伸
今まで通りにこのくらい屈伸が可能です。もう一枚の写真は試作4号機のです。一応デザインは継承しているっぽいですね。今回の5号機は、配線も大分綺麗になりました。4号機の時はひどかった・・・。
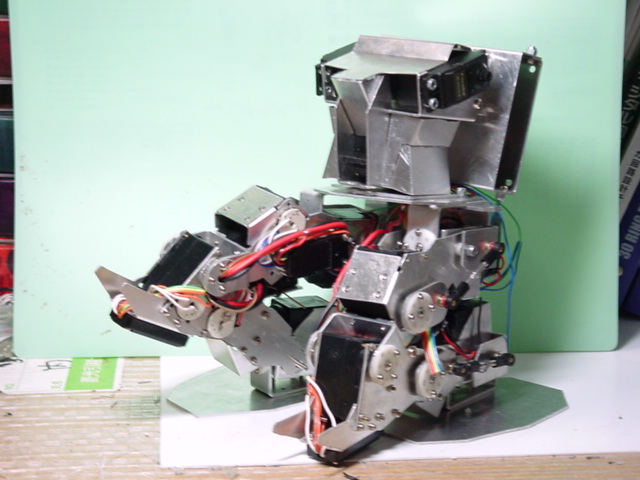
▼おまけ
で、稼動範囲の広さを証明した写真を・・・。こんなことするかどうかは分かりませんが、一応こんなことができますと。
足を巧みに動かし、相手に絡みつき行動不能にさせます・・・なんて。(笑)
さて、今回はちゃんと動いてくれるんでしょうか。近日中にその模様を公開。(動かすので)
まぁ、動かなかったら悪戦苦闘ぶりを公開???
[BACK]
[TOP]
[NEXT]
Copyright (C) 2003 U-hirohito All rights reserved.
 歩くと信じて、開発したWegweiser試作4号機が歩けずに終わったあの大会から約3ヶ月。最近オレサーボばかりやっている自分。ロボットを作っていなかったので、ややテンションが降下気味。
歩くと信じて、開発したWegweiser試作4号機が歩けずに終わったあの大会から約3ヶ月。最近オレサーボばかりやっている自分。ロボットを作っていなかったので、ややテンションが降下気味。 そして、宮田さんにONOさんを紹介してもらう。前々からお会いしたかったのだ。今度じっくり話したいなぁ。
そして、宮田さんにONOさんを紹介してもらう。前々からお会いしたかったのだ。今度じっくり話したいなぁ。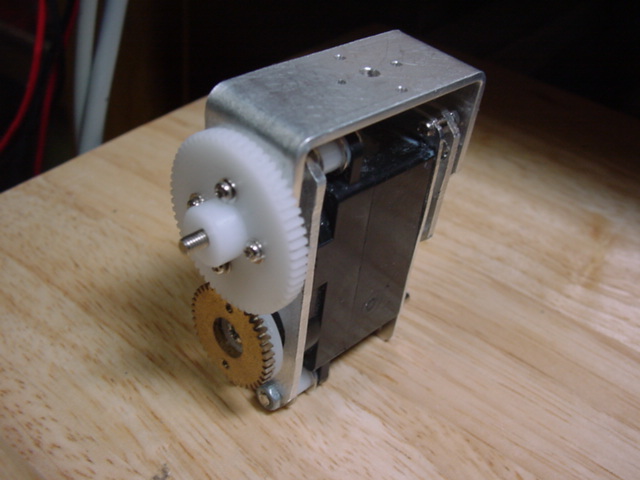 仕方ないので、カバンをあさっていると、前に試作したRCサーボ(ギア減速機能付)があったので出してみる。すると、意外にもこちらの方が人気だったりする。前からやってみたかった、RCサーボの出力をギアで減速するというのを作ったのだけど、意外と動きが良かったので、人気が出たようだ。
仕方ないので、カバンをあさっていると、前に試作したRCサーボ(ギア減速機能付)があったので出してみる。すると、意外にもこちらの方が人気だったりする。前からやってみたかった、RCサーボの出力をギアで減速するというのを作ったのだけど、意外と動きが良かったので、人気が出たようだ。