ROBO-ONEまであと11日
目立った進捗もなく予選行けるか行けないかどうかという状態はいい加減終わりにしたい今日この頃。遅すぎですが、そろそろロボット製作をスピードアップさせますよ。
現状は、
- マイコンとHtoHの通信のデバッグ完了
- ジャイロ補正テスト完了
こんな感じです(汗)
今回のロボットにて初めてジャイロを搭載してその恩恵に感動するという、時代遅れなことをやっとります。おかげで、あんだけ倒れやすかったロボットも頑張って踏みとどまろうとしてくれるので、少し希望が出てきたかなと。
ひとまず予定なんぞを・・・。
- 無線の組み込み(配線が多いので減らしたい)
- センサのログ取得機能(モーション作成のため)
- 前後左右の歩行モーション作成
- 起き上がり&倒れるモーション
- キャッチボール(必要であればセンサも搭載)
まずは、こんなところでしょうかね。まずは、参加資格審査を通れるように基本モーションを充実させるのが急務。参加資格審査受からなければ、予選などできないですし。
それらが終われば、規定演技のキャッチボールをする。これは確実にできるようにしないとね。
人に役に立つこと・・・まだ良いのが思いつきません。まぁ、これをやる前にとっとと上記のモーションをやらないと・・・。
23:54記
Zig-bee(BTX025)・・・いけるか?
進捗はあまりないですが、少しでも現状の記録を書いていこうと思います。以前テストで作った回路でPear-to-Pearを試みましたが、StatusLEDが点灯状態(通信可能状態)にならず、ずっと点滅状態でした。
今回ようやく、その原因がオシロスコープを使うことで判明。三端子レギュレータが発振してたのが原因。orz
33uFの電解コンデンサを追加することで、どちらも点灯状態となった。こんなもんだよ・・・自分のバグなんて。(T▽T)
現在はロボットに取り付けるパーツ及び、Zig-bee関係の回路を製作中。完成したら、ロボットに搭載する前に写真撮ります。
22:54記
無線ユニット完成

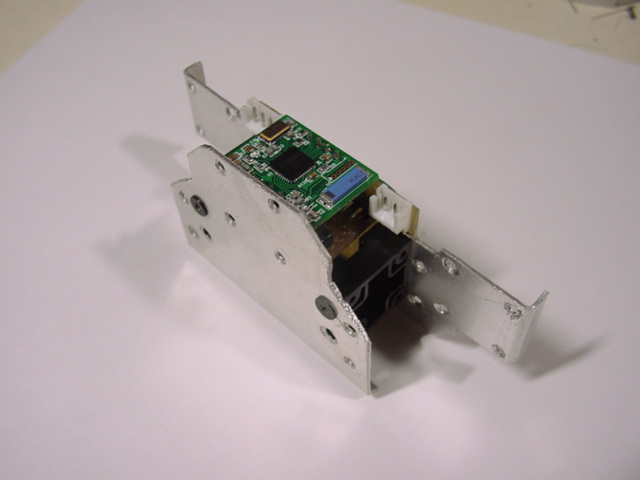
時間がかかってしまいましたが、なんとか無線ユニット完成です。このZig-beeは3.3V動作のため5Vに変換する必要がありトランジスタをレベル変換ICの代用で使用してみました。
通信させてみると、うまく動かない。オシロで確認すると、トランジスタを通した後の信号がに不具合が・・・。Lowになるべき所がHighのままでした。

「通信速度が57600bpsだから厳しいのか?」、「トランジスタの遅れが原因か?」なんて考えましたが、エミッタ側にプルダウン抵抗10KΩを付けたら問題なく動作。当然といえば当然ですけども。
で、この無線ユニットをそのまま腰の裏側に搭載します。この板金は、失敗した腰パーツを加工したものです。無線搭載するスペースが全く無かったので、苦肉の策です。

まだスペースもあるので、他の回路を搭載可能。圧電ブザーでも取り付けようかなと思っていますが余力があれば・・・っということで。
これで一番破損率の高い通信ケーブルを無線化できたので、安心してモーションが作れそうです。
ロボットに取り付けた画像は、また後ほどにでも。
26:00(0:20)記
作業せずに終了
猛烈な眠気で作業できる状態ではなかったので、そのまま就寝。
明日に向けて



帰ってきたのが0時だったので、そのまま就寝。
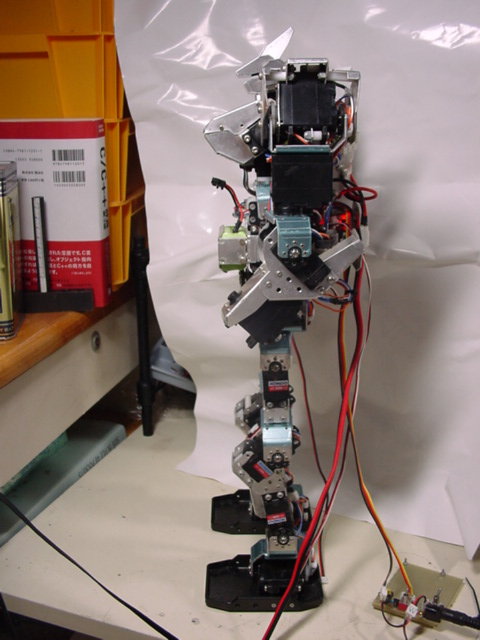
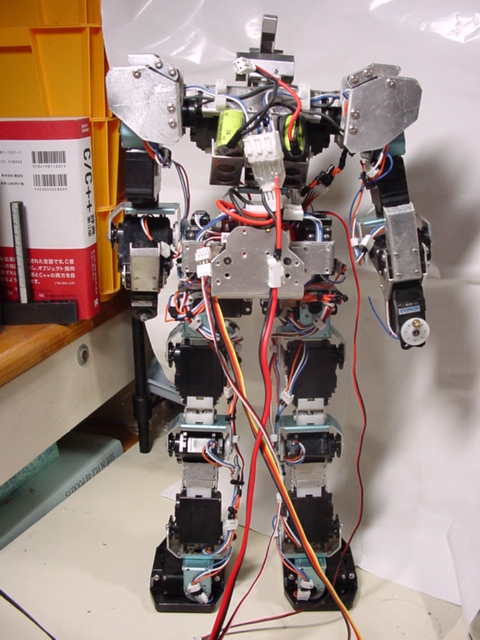
・・・する前に、立った写真を撮影しておきました。頭部がないとき足が長すぎてバランス悪いなぁ・・・と思っていたんですが、意外とバランス良く仕上がっているように思えてしまう。(^^;
まだ、ジャイロ制御モードなのでモーション作成はできません。orz


Zigbeeを使って57600bpsで通信するというテストはうまくいったのですが、このままだとHtoHとの通信がうまくいかないので、115200bpsに変換するボードを用意します。
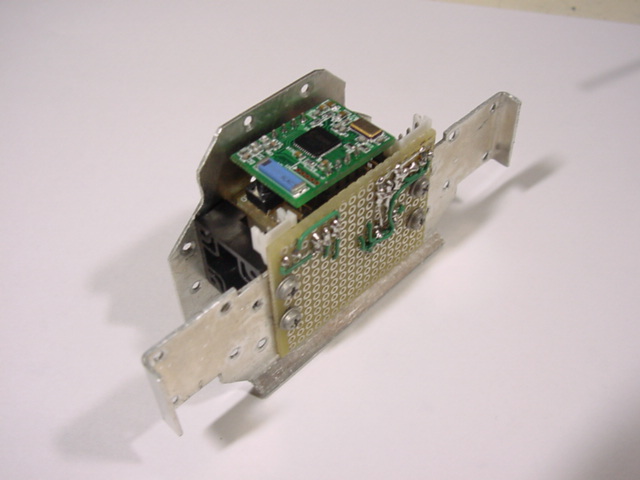
以前作ったAKI-H8/3069Fのボードをケースの中に収納し、Zig-beeを新たに増設し無線化します。
そして、前回製作したトランジスタでレベル変換する回路も搭載したのが、この写真です。試しに通信してみると、たまにデータが化けてしまう期間があったりしてうまく動きませんでしたが、無線コントローラはこの辺りも考慮して製作しようと思います。
前進モーション

参加資格審査で必要になる前進モーションを作ってみました。今まで高速歩行ばかりやろうとして失敗しているので、若干スピードを落としたモーションを作ってみました。
無線コントローラではスティックの倒し具合で歩行速度を2段階くらいで切り替えようと思っているので、使わないことはないと思います。
さすがにスピードを落としただけあって、以前のモーションよりも安定した歩行モーションになったと思います。
横から見ても若干後方へ倒れそうになりますが踏ん張れてます。この辺りが以前と違いますね。安定化したら連続歩行にも挑戦してみようと思います。
まぁ、その前に旋回と起き上がりのモーションも作らないといけませんが・・・。 【23:27記】
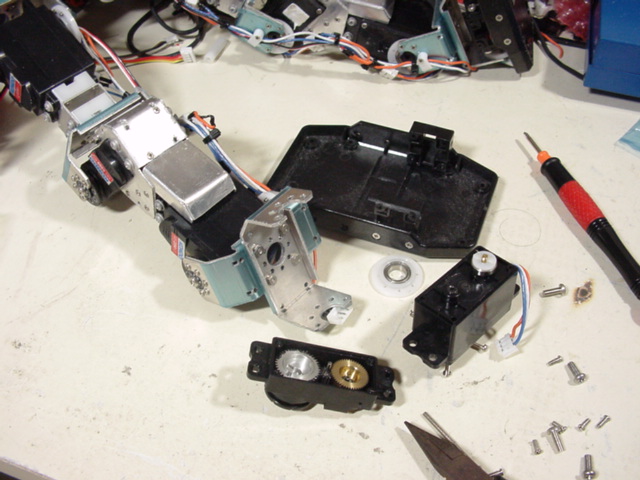
骨折

足首のプラギアが欠けた。修理開始 【00:33記】
修復完了。サーボをまわした時のゴリゴリ音がなくなる。この足首部分は最近良く壊れる。【01:09記】
右旋回

右旋回モーション完成。意外とあっさりとできました。4回実行したらほぼ90°になったので、1回で約22.5°くらいのようです。
これを8回やって180°ターンしないといけないんですけど・・・10秒でできるかなぁ。(-_-;)
【01:44記】

そんな訳で、心配になったので4連続で90°旋回してみました。動画の時間はきっかり5秒なので、5秒以内での90°の旋回は可能なようです。
スペースが広くないので90°が限界ですが、もうちょっと広い場所で180°ターンを試してみようと思います。
もうちょっと早く旋回できれば、安心できそうですが・・・。 【02:04記】
左旋回

左旋回モーション完成。こちらもあっさりとできました。右旋回と同じく1回で約22.5°くらいです。
右旋回、左旋回ともに言えることですが、45°くらい一度に旋回できればもうちょっとタイムを縮められるんですよね。
45°バージョンも近々挑戦してみようと思います。コントローラに割り当てる数は多いほうが良さそうですしね。
胴体くり貫き

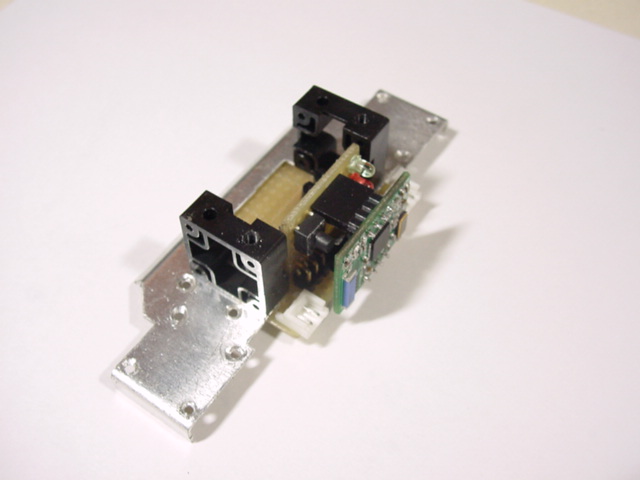
取り付け場所に散々迷った挙句、この位置に取り付けることにした。皆さんの予想通り、あのモーションのため用です。(^^;
ネジで留めてないけど、固定できてしまっている不思議。不都合があれば、板金パーツを追加予定です。
今後の作業予定は、このPSDの配線接続及び、腕軸用の信号線が切れているのでそれの修復です。
【26:01記】
作業進捗(簡易版)
02:00 作業開始。腕の配線を修復&手先取り付け。
03:00 左腕配線修復70%。手先組み上げ60%。
04:00 左腕配線修復完了。手先組み上げ完了。右腕配線へ移行
04:30 仮眠
08:00 起床。朝食
08:30 作業再開
09:00 右腕配線修復40%。引き続き、この作業を続行
10:00 右腕配線修復完了。Zigbeeのレギュレータに問題あり。電解コンデンサ増設
11:00 マイコン側のTXの電圧が2.8Vだったりするので、トランジスタを2SA1015への変更を検討
11:24 トランジスタを2SA1015を使ったテスト回路で通信したところ、通信エラーが消えた。信号の電圧が5Vに
11:39 変更完了。ついでに書き込みスイッチ&多目的スイッチを載せる。
12:00 書き込みスイッチ&コネクタ配線80%。終了後、腕のホームポジションを設定
12:49 書き込みスイッチ&コネクタ配線完了。腕のホームポジション設定完了
12:56 日記更新中。
13:00 昼食。外出
14:00 モーション作成の準備
15:00 設置完了。部屋移動。モーション作業開始。
16:00 歩行モーションほぼ完成。細かい補正はジャイロへ委ねる
17:00 起き上がりモーション(仰向け)作成開始
18:00 起き上がりモーション(仰向け)製作中
19:00 仰向け起き上がりを断念。うつ伏せ起き上がりに挑戦
20:00 夕食
21:00 肩の可動範囲、股関節のピッチ軸を調整。引き続き起き上がりモーション作成
22:00 もうちょっとで、足裏に重心が乗りそう
22:49 うつ伏せ起き上がり完成
23:00 WEB更新中。仰向けからの起き上がり挑戦
24:00 途中まで作ったモーションが、うつ伏せへ姿勢を変更できそうなモーションができる
ロボットの現在の状況とか

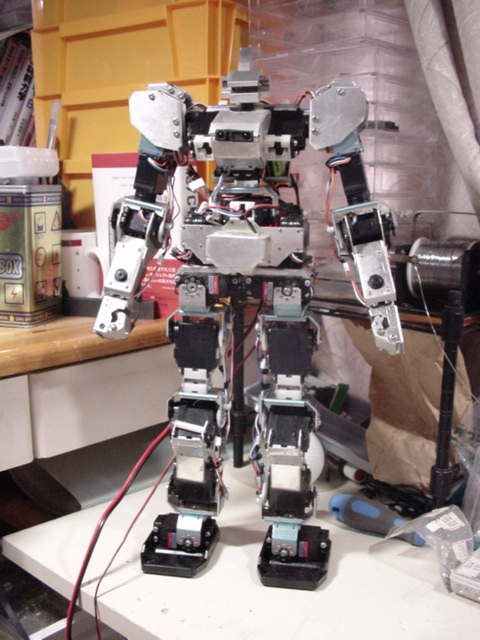
腕を再配線して、Zig-beeのレベル変換用トランジスタを変更し、手先を付け、ホームポジションを設定したのがこの写真です。
試しに歩行モーションを再生したところ、手先がついた影響のためか危うい歩き方をする。
ちなみに、左手の手先はロッドが付いていません。ロッドが見つかったら取り付けます。 【12:55記】
起き上がり(うつ伏せ)

仰向け起き上がりは、詰まってしまったので先にうつ伏せ起き上がりを作成しました。
重心が高いのが災いし、なかなか重心移動ができなくて苦労しました。
後は倒れるモーション作れば、ひとまず参加資格審査はOKですね。
それにしても、このモーションでこんなに時間がかかるとは・・・。 【23:00記】
起き上がり(仰向け→うつ伏せ)

専用のモーションを作りたかったのですが、時間も残り僅かなのでうつ伏せへ姿勢を変える方向で作りました。
途中まで作っていたモーションがうつ伏せへ移行できそうだったのが救いでした。
どうしても直接ではないので、うつ伏せへ移行する時間を短くなるように調整しました。 【25:05記】
今日一日を振り返って
なんか、明日が予選のように思えてしまう状態で、気持ちに余裕はなし。この程度の緊張感があれば、作業も進みそう。
1日の半分が半田付け作業で、残りがモーション作成だった一日。起き上がりのモーションで時間がかかるのは想定外でした。
起き上がりのモーションを作っている時は、「参加資格審査が終わらない〜、棄権になるぅ〜」っという感じだったので、完成して良かったなと。
歩行は場所によって、揺れたり、問題なかったり、倒れたりするのでジャイロの補正がどの程度効くか検証しないといけないですね。
まだPSDセンサをA/Dに繋いでないので、早く繋いで値を確認しないと・・・。後は電池が圧倒的に足りないので組まなければならないし、無線コントローラもある程度作らないとマズイ。やらなければならないことはまだまだたくさんある。 【25:57記】
作業進捗(簡易版)
01:00 倒れるモーション作成開始
01:37 倒れるモーション完成
02;00 WEB更新
03:00 PSDが転倒の衝撃で破損したため、もう少し引っ込んだ場所に固定する作業を開始。ロボットを分解
08:00 起床。朝食
09:00 引き続きPSD取り付け作業
10:00 ロボットを組み立て開始
10:27 PSD取り付け完了
11:00 PSDの値を確認。センサを使ったモーションができるようプログラミング開始
12:00 ジャイロを使用するモーション番号を固定化して処理をするようにする
13:00 ジャイロを使った旋回を試みる。モーションの後でセンサの値を常に更新していないことが発覚
14:00 センサを常時更新している状態で、歩行、旋回をやってみた。問題なく動作する。歩行モーションはもうちょっと改善の余地がありそう。
15:00 WEB更新。右腕のネジが大量に外れているのを確認。修復作業開始
↓以下、キャッチモーション製作
22:00 キャッチモーション完成。キャッチ率は投げての熟練度次第
22:50 その他デモ用モーションを作成開始
倒れる

日付が変わって、最初にできたモーションはコレ。参加資格審査で必要になる最後のモーション
起き上がりの逆をやれば良いので、すぐできた。倒れるモーションは、余分なポーズを削除してもOKなので、ロボットを叩きつけない程度にカットする。
ようやく、スタートラインに立った形。予選用のデモを作らないと・・・。【01:41記】
ジャイロあり、なし

ジャイロ機能を使用したときとしていないときの動画を載せました。ジャイロなしもギリギリ倒れない動画を撮ろうとしましたが、全部倒れました。(-_-;)
過去の反省から胴体前面のフレームは強化しているので、この程度はどうということはないんですけど、やっぱり嫌ですね。(^^;

で、こちらの動画がジャイロありの歩行です。最後の止まる時にグラつかないのはかなりありがたいです。
しかし、元の歩行が腰を傾けて歩く仕様なので、ジャイロが無駄に働いてしまっています。
この歩行をいかに修正するかがポイントですが、その前にキャッチボールへ。 【14:31記】
[BACK]
[TOP]
[NEXT]
Copyright (C) 2007 U-hirohito All rights reserved.