モーション再生ソフト
あまり作業できず。モーション再生ソフトを少しだけいじる。for文が多くなってしまって良い感じがしないけど、その辺は動いてから考えないといけない。そんな感じで手をつけ始めました。とは言え、12時頃には夢の中へ行ってしまったので、次回の自分に望みを託す。
モーション再生ができるようになったら、配線作業ですかね。時間もあまりないので、この連休が勝負だ。(入っている予定で、ほとんど時間つぶれるけど。OTL )
モーション再生ソフト完成
ようやくモーション再生ソフトができた。一応、これで一通りできるようになったのでした。シナリオ再生はできないけど、それはまた時間のある時にでも。
時間の指定が、20msec、40msec、80msec、160msec、320msec、640msec、1280msec、2560msecという感じに選択できますが、やはり細かく設定できないのは痛いかも。
20msec、40msec、60msec、80msec、100msec、160msec、200msec、1000msecとかにアレンジもできるけど、モーション作ってみてこの辺はいじってみようかなと。
ちょっと気になる点もおあったので、もちっと調整が必要かも。
部品が足りないのです。
ローハイトサーボホーンとか、アッパーケースとか、無線機とか、いろいろと足りない物が出てきたので、明日か、明後日辺りに買出しに行かないとナ。
部品さえ揃えば、配線して動かすだけ。
買出し
サーボのオプションパーツ系で足りない部品が多かったので、買出しに行く。しばらく行かないうちにハイブリットサーボホーンなるものが売られていたので、そちらも購入。久々にロボット関係で出費したかも(笑)
秋月に初めて、寄ってみた。今日は木曜日だったため、バーコードが張ってある商品のみだったので、レジのおばちゃんが会計してくれる。なるほど、こうなっているのね。
再構築

買出しをしたパーツに交換しつつ、配線を付け替える作業を行う。左足の組み上げのみ終わった。足裏は、買ってきたものを使っています。KRS-2350とサーボマウントAのみで直接取り付けられるのに驚き。おかげで、パーツ数も少なくて済みます。
交換したパーツは、ハイブリットサーボホーン、ハードシャフト、初段のプラギア、メタルブッシュ入りアッパーケースです。ばらして入れ替えて、また組み上げるので時間はかかります。でも、今までと違って耳のみで固定しているので、分解は楽です。
サーボ単体には通電して動作チェックは終わっています。今はひたすら組み上げるのみっ!
配線中

左足の配線が完了。通電させても問題なく動作しました。しかし、今回初めてプルプル現象というものを確認。今までは怪しいパーツ使っていたから寸法のずれ等の影響で起こらなかったのかも。
確か、フリクションスペーサーで吸収できた気もするので、それに交換かな。ちなみに、一番上のサーボはまだ配線の交換が終わっていません。
再設計
腰の設計がよろしくないので、設計しなおし。基板の取り付け穴も追加し、マイコン用バッテリ取り付けカバーも作成。後は、明日の自分に託す。
全5パーツだ。がんばれよ、明日の自分。今の調子ならすぐできるさ。
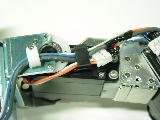
腰フレームの加工完了

腰フレームの加工が完了する。組み上げるとこんな感じになります。剛性の問題はなさそう。電池は、9V角型電池からラジコン飛行機用(?)の6セル電池を3個ほど用意。そのうちの一つを積んでいます。
マイコンボードのスペースは、アレだけなら問題なし。ただ、PWMを16ビット増設する必要があるので、このスペースに収まる基板を製作しないといけない。
現状ではその基板もまだないので、考えておかないと。
作業スペースを確保
作業スペース周辺がカオスなので、作業しやすいように掃除をした。ネジとか電子部品が入り混じっていてひどい状態でしたよ。ほぼ半日自宅に居なかったので、掃除で終わってしまった。
バッファIC増設
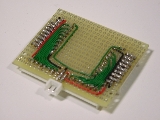
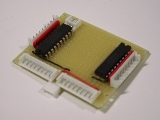
現状の構成だと、16bit分しかPWMが出せないので、バッファICの増設を行う。ちょうど腰フレームもできたしね。色々詰め込むと失敗するので、今回はシンプルにバッファICのみ実装してみました。
動作検証はまだですが、確認が取れればこのまま足の配線を一気に終わらせ、起動実験でも行おうかと。うーん、この辺りが境目な感じがする。ここを突破できれば、全身が動くのと同意義だし。
次回の壁は、センサや無線機を使う時かな。
動作確認完了
昨日製作したバッファICを載せたボードの動作検証をした結果、特にこれと言った問題もなく動いていた。意外とあっさり動いたので、驚き。いつもなら、いろんなドラマが展開されていたと思う。(良い事ではないが)
このまま足の配線と行きたいところであるが、他にやることがあるのでこの辺りで終了。配線は明日以降の課題となった。
配線がなかなか終わらない

毎日少しずつ配線してますが、なかなか終わらないですね。右足はほぼ完全に配線が終わっており、左足はあと少し残っているという感じです。
足の配線も無理なく行えているので、足を動かしても引っかかったりすることもないかと思います。メンテナンス性も上がっていると思いますが、その効果は実際に分解することにならないと分からないですね。
早めに配線を終わらせたいです。
太陽が昇ってる(※イメージ映像です)
勝手に再起動が始まったので、待っていたらWindowsのインストールする項目が9個くらいあり、しかも時間がかかっているので、横になっていたら朝だった。
↑という話だったのさ。
不覚でした。
配線の処理に使っているもの

そんな訳で、こんな話で引き伸ばしを謀る。(ぉぃ)
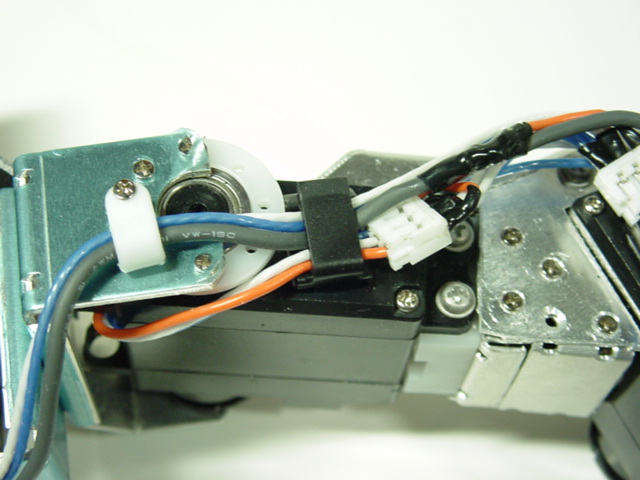
ロボットの足の配線をまとめるのに使っているのがこの二種。どちらもダイソー(100円均一)で売っていたものです。黒い方は裏が両面テープになっています。
白いほうは釘を抜いて、直径2mmの穴を空けて釘の代わりにネジを使っています。これをサーボホーン周りに使うんですが、使うと綺麗におさまるし、結束バンドを使わないためゴミもでないのでお勧め。
腕もこれを使って綺麗にまとめようと思ってます。
[BACK]
[TOP]
[NEXT]
Copyright (C) 2007 U-hirohito All rights reserved.
 買出しをしたパーツに交換しつつ、配線を付け替える作業を行う。左足の組み上げのみ終わった。足裏は、買ってきたものを使っています。KRS-2350とサーボマウントAのみで直接取り付けられるのに驚き。おかげで、パーツ数も少なくて済みます。
買出しをしたパーツに交換しつつ、配線を付け替える作業を行う。左足の組み上げのみ終わった。足裏は、買ってきたものを使っています。KRS-2350とサーボマウントAのみで直接取り付けられるのに驚き。おかげで、パーツ数も少なくて済みます。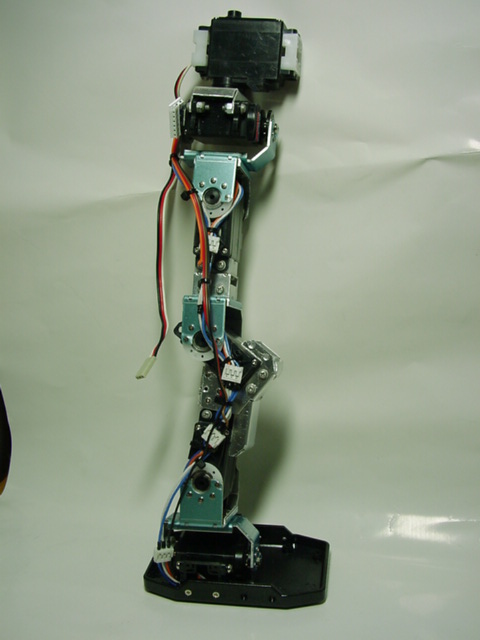 左足の配線が完了。通電させても問題なく動作しました。しかし、今回初めてプルプル現象というものを確認。今までは怪しいパーツ使っていたから寸法のずれ等の影響で起こらなかったのかも。
左足の配線が完了。通電させても問題なく動作しました。しかし、今回初めてプルプル現象というものを確認。今までは怪しいパーツ使っていたから寸法のずれ等の影響で起こらなかったのかも。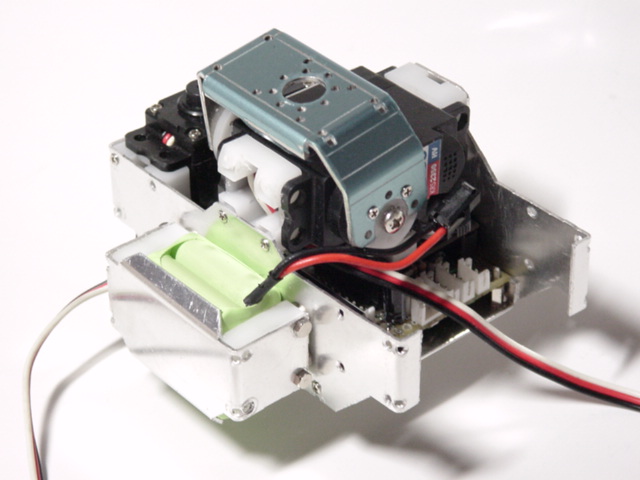 腰フレームの加工が完了する。組み上げるとこんな感じになります。剛性の問題はなさそう。電池は、9V角型電池からラジコン飛行機用(?)の6セル電池を3個ほど用意。そのうちの一つを積んでいます。
腰フレームの加工が完了する。組み上げるとこんな感じになります。剛性の問題はなさそう。電池は、9V角型電池からラジコン飛行機用(?)の6セル電池を3個ほど用意。そのうちの一つを積んでいます。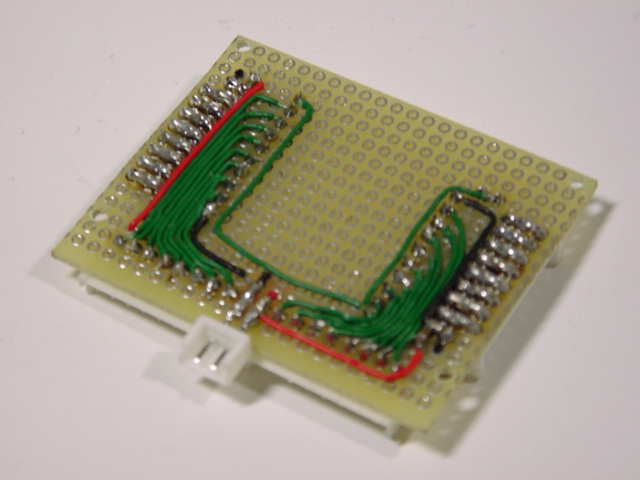
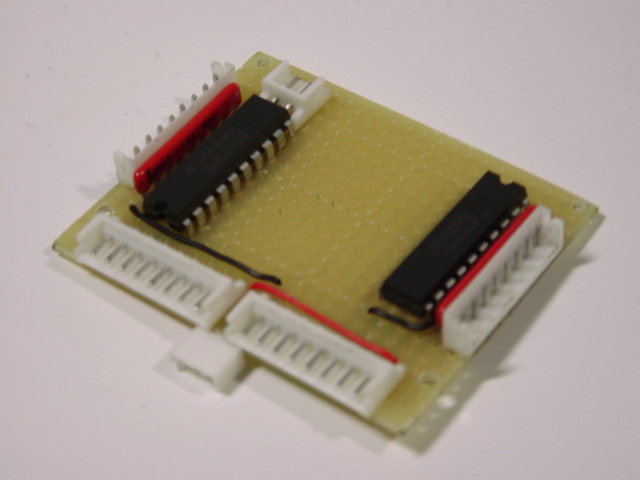 現状の構成だと、16bit分しかPWMが出せないので、バッファICの増設を行う。ちょうど腰フレームもできたしね。色々詰め込むと失敗するので、今回はシンプルにバッファICのみ実装してみました。
現状の構成だと、16bit分しかPWMが出せないので、バッファICの増設を行う。ちょうど腰フレームもできたしね。色々詰め込むと失敗するので、今回はシンプルにバッファICのみ実装してみました。 毎日少しずつ配線してますが、なかなか終わらないですね。右足はほぼ完全に配線が終わっており、左足はあと少し残っているという感じです。
毎日少しずつ配線してますが、なかなか終わらないですね。右足はほぼ完全に配線が終わっており、左足はあと少し残っているという感じです。
 そんな訳で、こんな話で引き伸ばしを謀る。(ぉぃ)
そんな訳で、こんな話で引き伸ばしを謀る。(ぉぃ)