▼ROBO-ONE テクニカルカンファレンス
 歩くと信じて、開発したWegweiser試作4号機が歩けずに終わったあの大会から約3ヶ月。最近オレサーボばかりやっている自分。ロボットを作っていなかったので、ややテンションが降下気味。
歩くと信じて、開発したWegweiser試作4号機が歩けずに終わったあの大会から約3ヶ月。最近オレサーボばかりやっている自分。ロボットを作っていなかったので、ややテンションが降下気味。とりあえず、毎度カンファレンスでは、みなさん色々な物を持ってきて見せて頂けるので、今回は自分もオレサーボを持って行くことにしました。なので、前日に最終調整をやっておりました。そして、就寝・・・。(まさか、このことが裏目に出るとは・・・)
カンファレンス当日。起きた自分。目覚し時計を見る・・・時計は11時を指していた。
がーーーーん
「な・・・なんですとぉ〜〜〜!!」
どうやら、前日のバイトと、夜遅くまで調整をしていたのが効いたらしい。
「早く寝ればよかった・・・」
かなり後悔。
仕方がないので、休み時間を狙い出発。なんとか、前の方の席の確保に成功。前半が終わってしまったのが非常に悔しいが、手遅れである。そして、後半の講義が始まる。講義を聞いているだけで、やる気がかな〜りUP!早く帰って設計したい気分にまでなる。強力だ。
カンファレンス終了後、宮田さんのバーニング君を見せてもらい、触らせてもらった。足の関節がスムーズなこと!さすがマクソンモーター!!(やる気UP)
 そして、宮田さんにONOさんを紹介してもらう。前々からお会いしたかったのだ。今度じっくり話したいなぁ。
そして、宮田さんにONOさんを紹介してもらう。前々からお会いしたかったのだ。今度じっくり話したいなぁ。さあ、いよいよ懇親会の始まりだぁ〜!!さらにやる気を充電すべく、戦場へと向かう。
そして〜!今まで頑張ってきたオレサーボが唸りを上げるぅぅぅぅ・・・はずだったのですが。
「なんで、動かないんじゃ〜〜!!」
「○○は飼い主に似るとは言うが、オレサーボも似るんかぁ〜〜〜!!(本番に弱い。)」
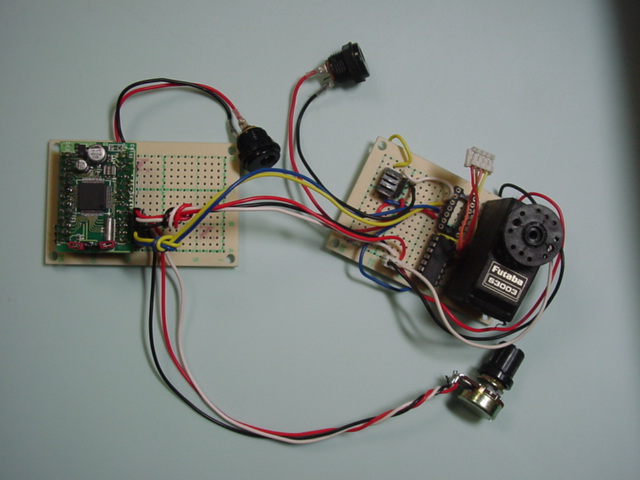
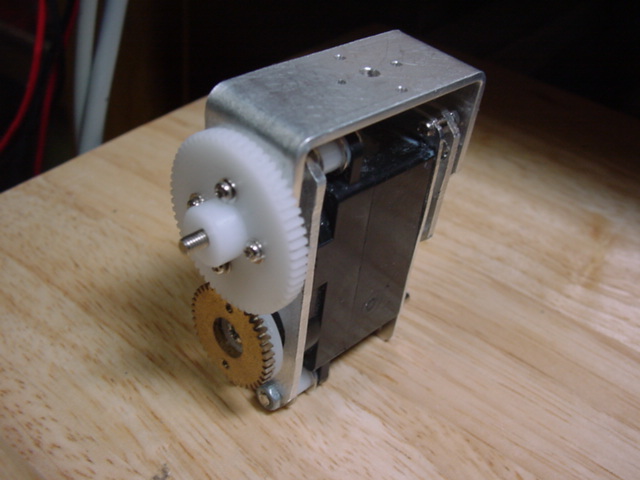 仕方ないので、カバンをあさっていると、前に試作したRCサーボ(ギア減速機能付)があったので出してみる。すると、意外にもこちらの方が人気だったりする。前からやってみたかった、RCサーボの出力をギアで減速するというのを作ったのだけど、意外と動きが良かったので、人気が出たようだ。
仕方ないので、カバンをあさっていると、前に試作したRCサーボ(ギア減速機能付)があったので出してみる。すると、意外にもこちらの方が人気だったりする。前からやってみたかった、RCサーボの出力をギアで減速するというのを作ったのだけど、意外と動きが良かったので、人気が出たようだ。うむ、予想外の出来事は起こるものだなぁ・・・。
そんな感じで1次会は過ぎ、2次会へと舞台を移す。二次会では、MAGIの製作者、ZIPPONさんに色々とお話を聞かせてもらった。ZIPPONさん曰く、どの部品が何グラムか頭に入っているのだそうだ。う〜む凄い!
さらに、ロボットも全身カーボンで作られており、さらに徹底した肉抜きがされていた。次回大会での活躍が凄く楽しみである。
そして懇親会は終わった。有る意味、衝撃的な一日だった気がする。終わってみると、かなりのやる気が充電されたのが分かる。(満充電か!?)ようやく、夏の大会のショックから立ち直ったようだ。(おそっ)
というわけで、まずは12/6に萩原さんが練習試合みたいなことをされるようなので、足だけでも完成させて持っていくのを目標にすることにした。今回は確実に歩くようにしてから上半身を作ることにする。
仮に完成せずとも、去年よりはスケジュール的に早いはずだ。去年はなんだかんだで、翌年にプログラムをしていたような記憶があるし・・・。
ともかく、もう歩かない機体は作りたくない・・・。(同じ失敗は、ここで止めることにしよう。)