ぐちゃぐちゃだったホームページを整理
今まで、なんどかホームページの改装を行ってきたが、その度に日記のスタイルが違ったので、今回デザインを統一した。今までやろうやろうと思ってやっていなかったので、いい機会なのでやってみた。修正に3日ほどかかったが、よしとする。
あとは、トップページをちょっと変更してみた。画面の小さい方でもTOPページのほぼすべてが見れるようにしてあるはずです。メニューは、マウスを乗せるとサブメニューや説明が出るようになってます。JavaScriptが動かなくても、基本的にどこへでもいけるようにしてあります。
ロボットの方はどうか?
ロボットは、下半身の加工が終わり塗装までしてあります。あとは組むだけです。塗装したフレームの画像は今晩にでも追加するとして、今日中に組み上げたいところ・・・。まぁ、いつもの経験から言うと無理かな。
気持ち的に、明日の夜までに組み上げ及び配線まで行きますかな。25日の練習会は・・・無理そう。見に行くだけならOKかも。
足の換装パーツ

昨日は帰ったのが夜中の0時だったので、更新できず!まぁ、そういう時もありますってことで・・・。今日は写真をバシバシ撮ったので、画像満載でお送りします。えっ?重いって?その辺は、ぶろーどばんどで乗り切ってください。d(≧▽≦ )
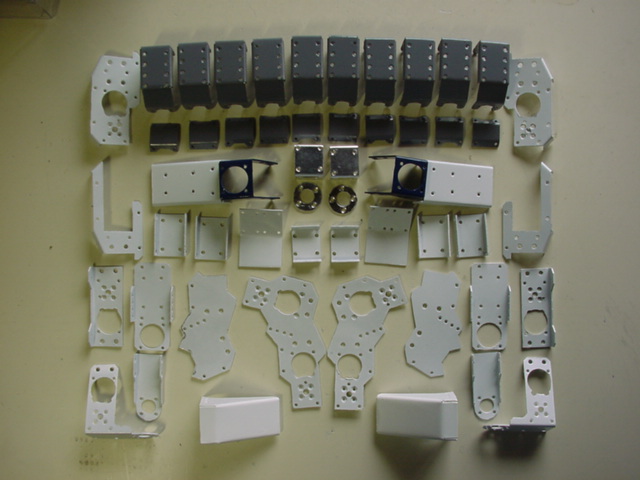
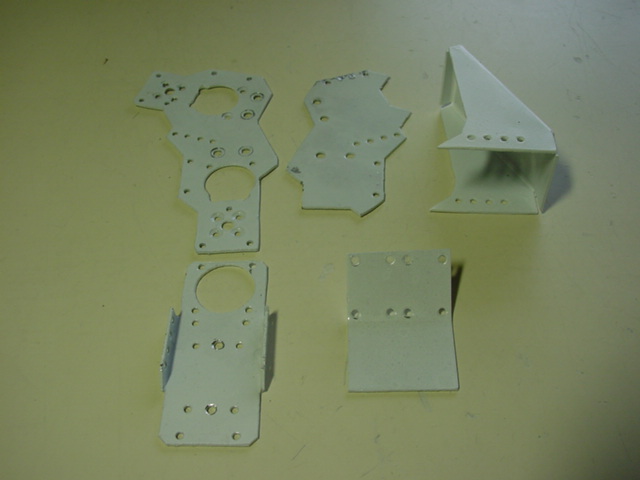
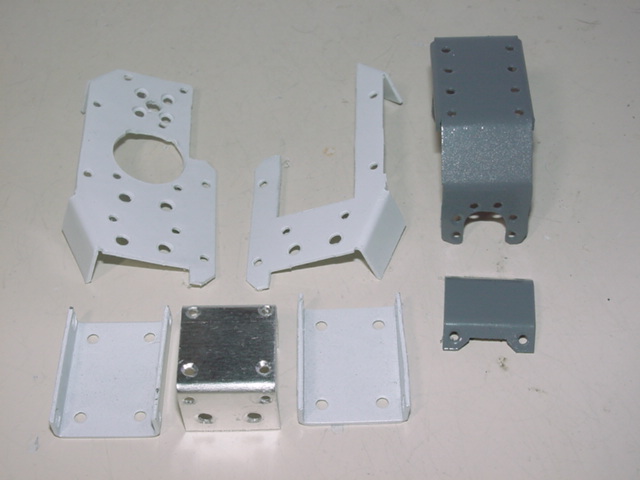
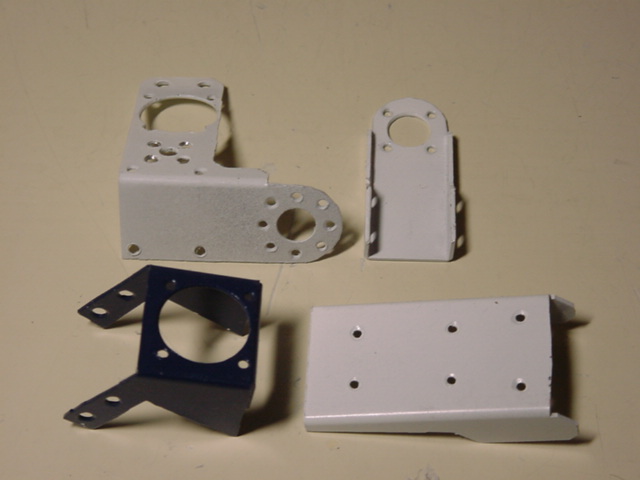
まず最初に、塗装後のパーツなどをっ。総パーツ数54です。細かいパーツが多いので、途中でなんどか飽きてほったらかしになってしまっていた換装パーツ。そろそろ働き者を雇いたい感じ・・・。
前回の足は、強度不足やネジの本数が少ないという理由でかなりグラグラしていた。そのため、今回は剛性アップを目指してみました。
基本的に、ブラケットの強化がメインですが、
稼動範囲も増やしたり、裏蓋搭載スペースを設けたりといろいろやっていたら
使いまわせるパーツがなくなってしまった。(−_−;
いきなり、加工し忘れ

いきなり設計ミ・・・ごふんっげふんっ、加工し忘れでブラケットの皿加工をする羽目に・・・。写真の皿加工してあるのがまさにそれです。もっとも、追加工が必要なのは2パーツだけなので特に時間もかからず終了。自宅だと、座りながらやるので、何気に疲れるから敬遠気味な穴あけ・・・。
ブラケット組み立て




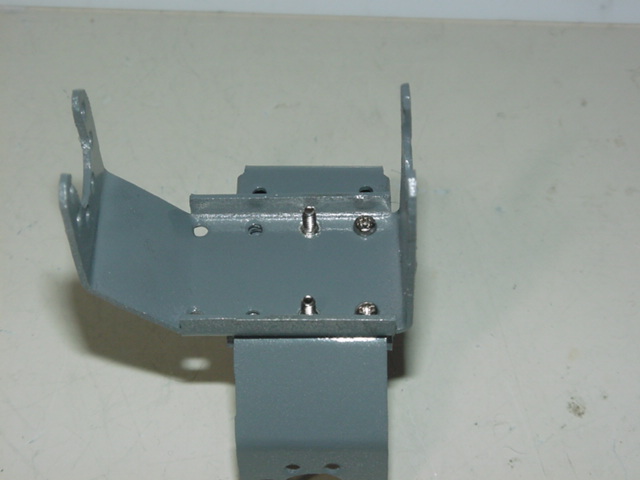
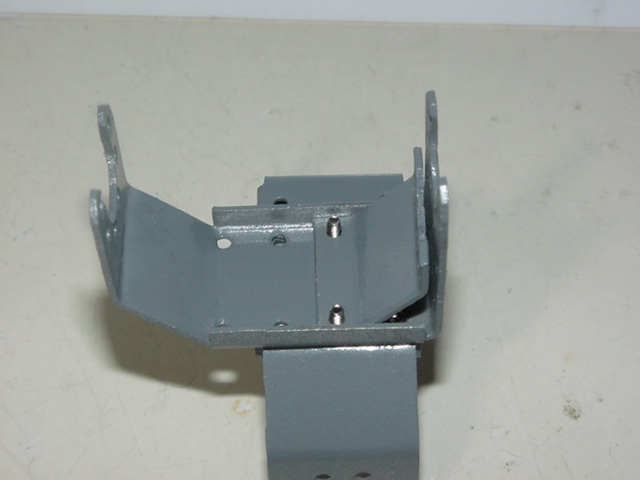
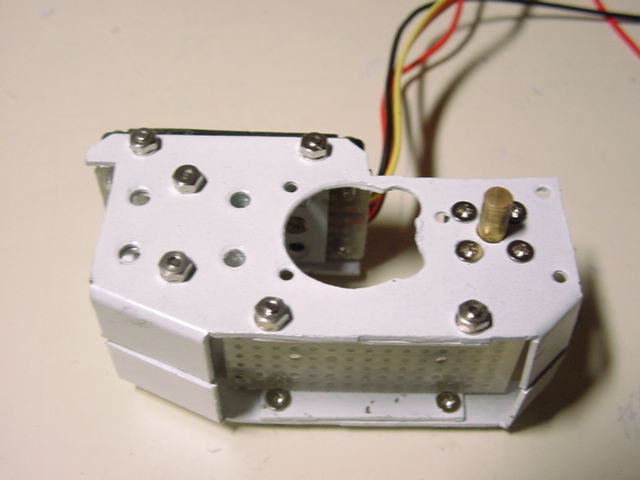
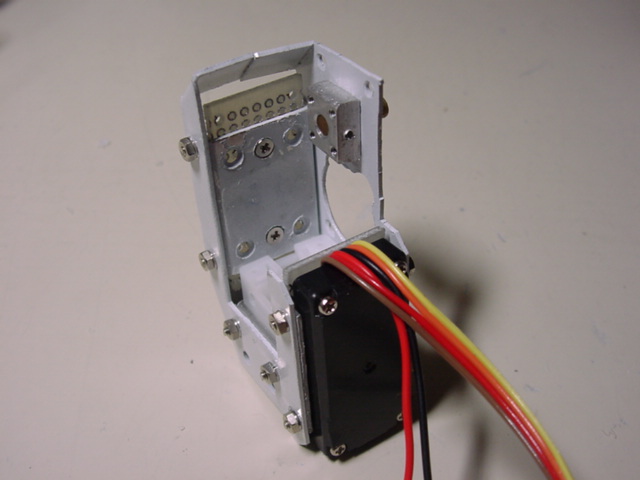
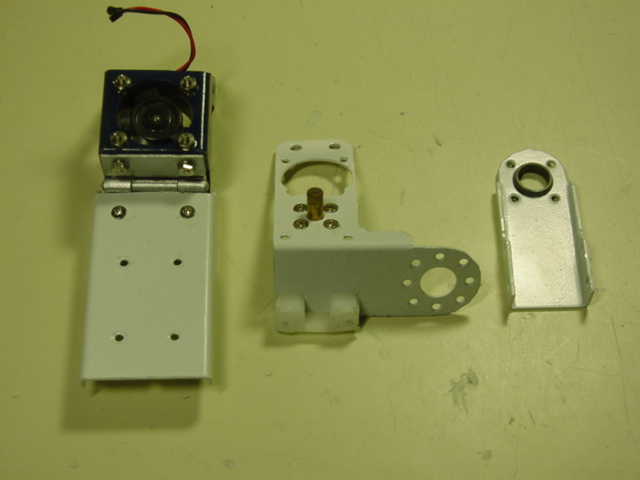
さて、先ほど皿加工したブラケットと通常のブラケットを組み立てます。手前の小さいパーツがブラケットを補強するパーツです。使い方は後ほど説明するとして、まずは皿加工がなぜ必要であったか。
写真二枚目をご覧ください。このようにブラケットを使うんですが、中央のネジが出ている部分が見えますよね・・・あれが、皿ネジなのです。要するにあのネジの下に穴が空いていないので、ネジの頭を板の中に収める必要があったわけです。
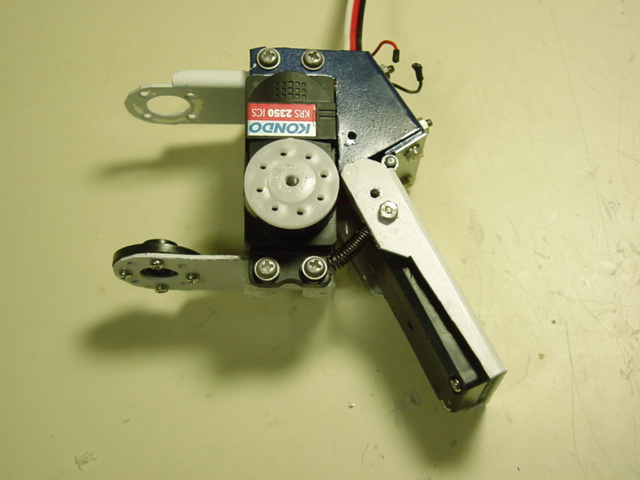
そして、このネジに補強パーツを挿入し、ナットで固定します。今まで、90°曲げをしている板はよく曲がったりグラついていたのですが、この補強パーツのおかげで、全くグラつきません。まぁ、板厚が1mmなので当然といえば当然なんですけど・・・。
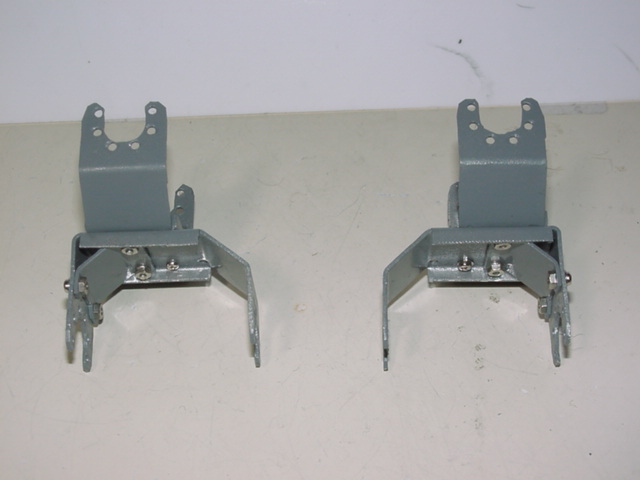
で、これを左右2パーツ作っておしまいです。
右足のみ組みあがる

本当は各パーツの説明もいれておこうかなぁ・・・とか思っていたんですが、写真不足のため一時保留。左足を作る際に再度組み立ての様子を撮ろうと思います。何気に、こういう記録残っているとあとで助かるし・・・たぶん。
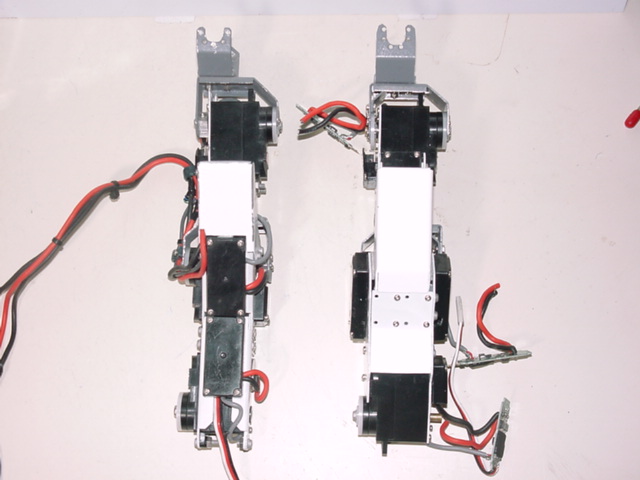
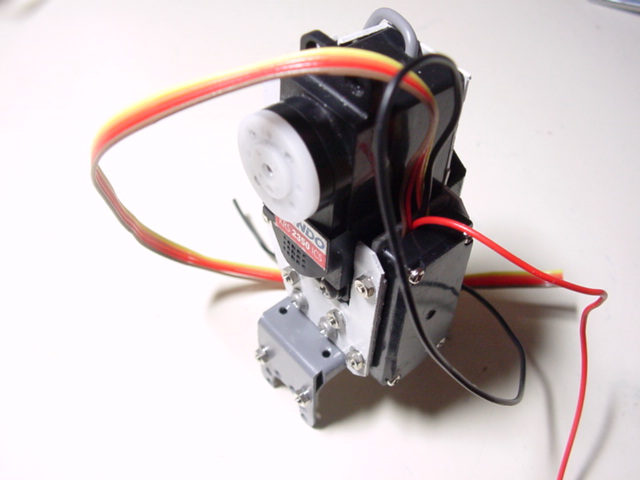
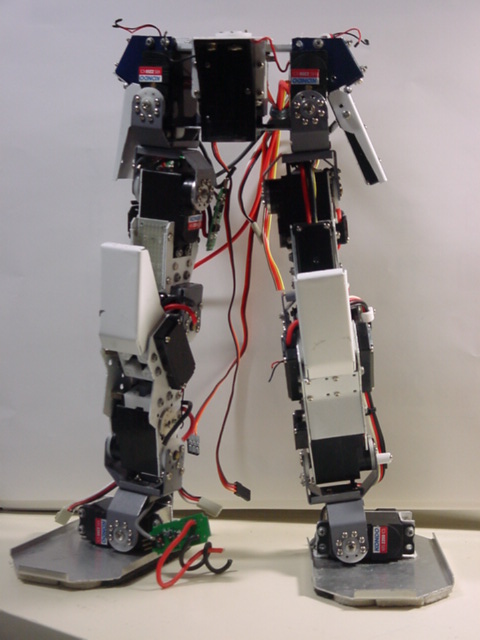
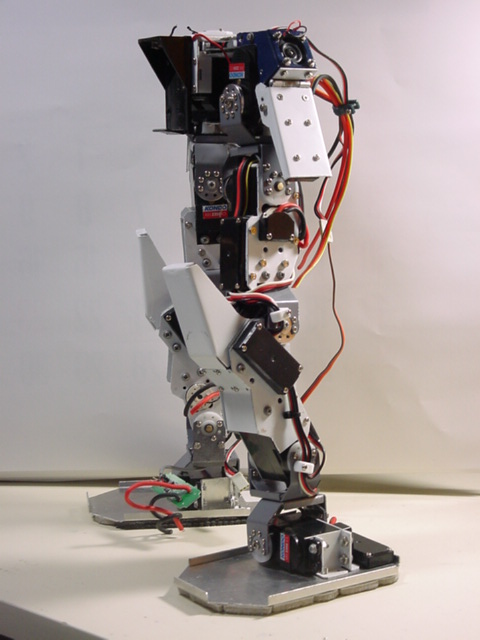
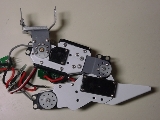
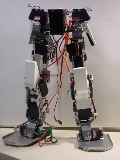
さて、前にもやったことがありますが旧型との比較です。高さに関しては基本的に同じです。新型の方は若干足のボリュームがアップしています。今まで細すぎて全体的なバランスがイマイチだったんで、こうなりました。
横もボリュームアップ。ももの辺りも思考錯誤の末こんな形状になりました。稼動範囲もそんなに小さくならんので、よさげ。
最後に稼動範囲の比較などを・・・。新型はちびっと稼動範囲が広くなりました。屈伸時には130°くらいいけたかなぁ・・・。前の方にも曲げられるんですが、途中で干渉するので40°くらい。そんな訳で、稼動範囲は170°あったりしてます。
まぁ、毎度の事ではありますが・・・
間に合うんでしょうか?
大会まで残り3週間くらいしかない・・・。センサに手を出さなきゃいけるかなぁ・・・。
く・・・手間取っては・・・大事に障る!
練習会・・・来週は行ってみようかな。
ロボットが組み立て中で、出来上がってないので今回の練習会は見送り・・・。来週辺り行ってみようかなと思ってます。来週まで1週間。とっとと組み上げて、ソフトや電装系にいかないと・・・。
助手A:ROBO-ONEまで、あと20日です!
ユウ :勝負は1週間だ!それで阻止限界点を越えてしまう。
助手B:阻止限界点?
助手A:ここです。ここを突破されれば、ROBO-ONEの予選を突破する術は・・・。
ユウ :その前に稼動状態に持っていき、モーションを作らなければならん。
まぁ、分かっては・・・いるんだけどね。仕事をやりつつロボ作っている方に比べれば時間は多いんだから、がんばって追いつこう。
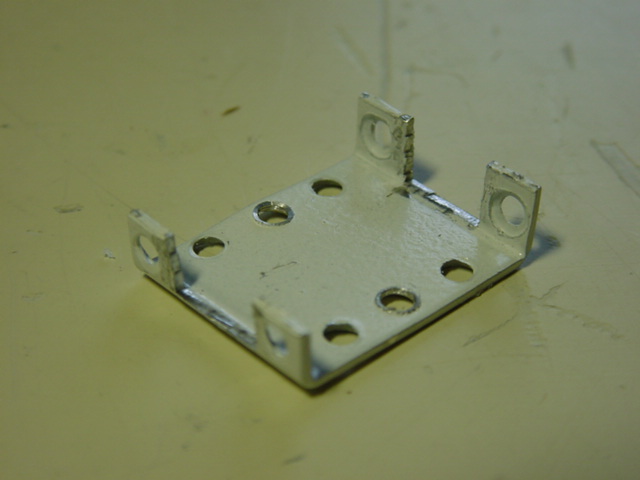
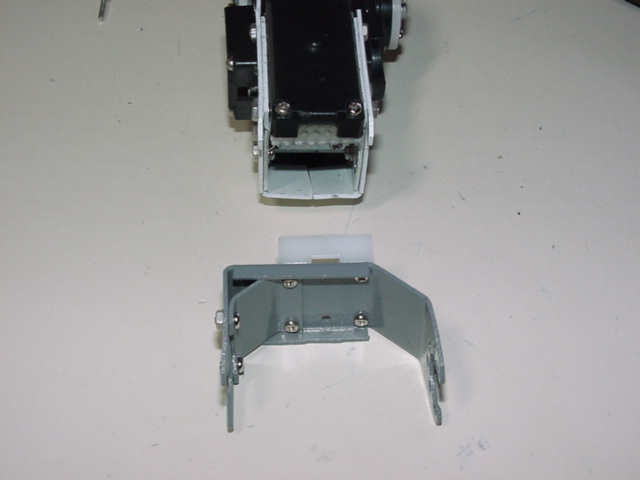
脛部品の追加工


制御基板を固定するフレームが設計ミスで固定できないので、追加工することになった。どこが設計ミスかというと、ネジを締めようとしても、ドライバーが入れられないというやってはいけない設計をやってしまったのだ。(T−T)
そんな訳でネジによる固定は諦めて、他のパーツを固定しているネジに引っ掛けるという方法にすることにした。で、その際ぶつかる部分があるので、フレームの一部を切断する必要があるのだ。で、それがこのパーツ。
工具はハンドニブラを使い、切断しました。今じゃ、金切りバサミと共になくてはならない存在なのである。
脛の部品


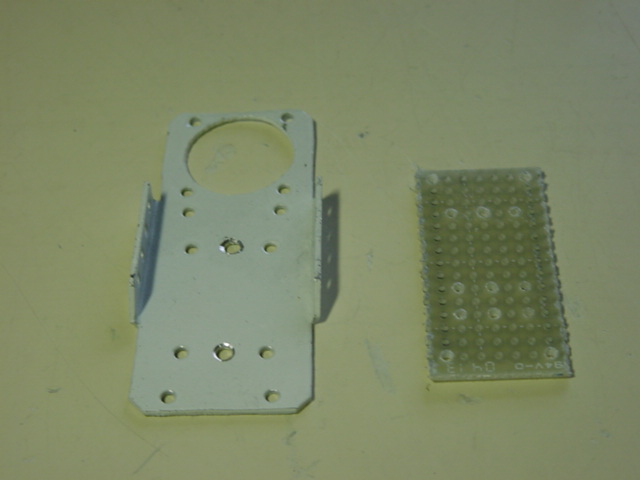
で、これが今回脛に使うフレームとパーツです。ヴェークヴァイザーで使われているアルミは全て厚さが1mmなので、ネジを切ってもすぐダメになるので、今回はこのガラスエポキシの片面基板にネジを切ってフレームの連結用パーツとして使うことにしました。
昨日使ってみたところ、なかなかよさげです。裏蓋の固定もこの方法を採用しています。ただ、穴と穴の間隔が2.54mmなので、若干ネジを閉めるときに苦労します。まぁ、いざとなれば裏蓋の穴を2mmから2.5mmに拡張すれば良いので、大きな問題にはなりません。
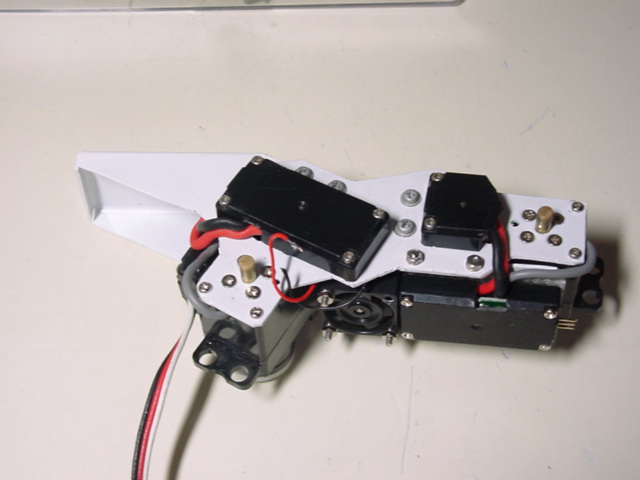
腿の組み立て






腿のフレームはRCサーボの脱着が楽にできるようになっています。故障しても苦労しなさそうだ・・・。逆に脛はあんな感じなので、故障されると非常に困る。
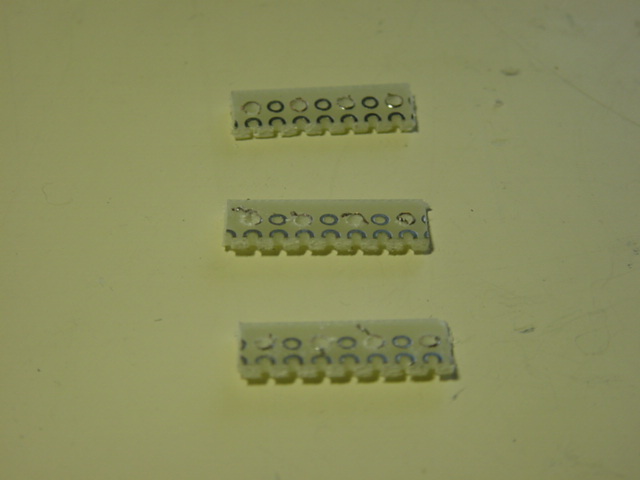
ちなみに、裏蓋は二つまで搭載可能。内一つは制御基板用で後方の埋め込みスペースに、もう一つはコネクタの分配用に使う予定で、前方の出っ張り部分にそれぞれ収めます。
ここでも、サーボスペーサAはを使ってRCサーボの固定やフレームの固定に活躍しています。何気に使えるヤツです・・・えぇ。
前回の腿には冷却ファンがあったんですが、今回はスペースがないので廃止しました。その代わり、腰の方に冷却ファンが付いています。あちらは結構発熱するので、あったほうが良いかも・・・。
今日の戦果

ようやく足が組みあがりました。配線も一緒にやっていたのでそこそこ時間がかかってしまい、ここまでしかできていませんが・・・。左足は配線ともに完成です。今のところは・・・(^−^;
あっ、冷却ファンの配線がまだでした。5Vをどこから供給するかが問題ですが・・・RCサーボ用の電源を3端子レギュレータで5Vに落として使いますかな。
ちなみに、上半身と下半身はまだ接続していません。ソフトの修正が少し必要なので、まずは足だけで調整しようと考えています。VBもバグ残ってるし・・・ちと心配だ。
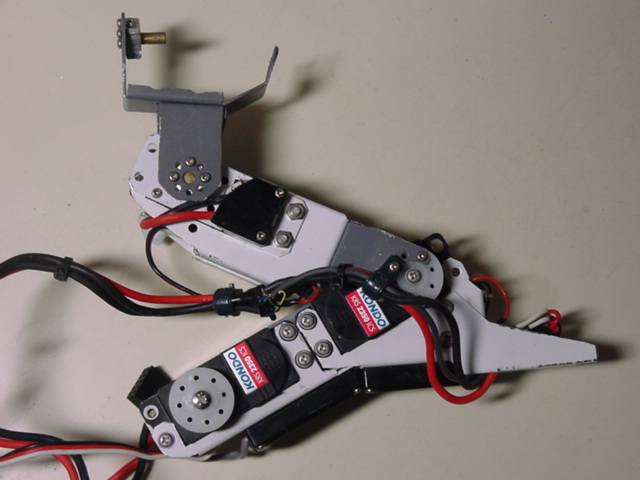
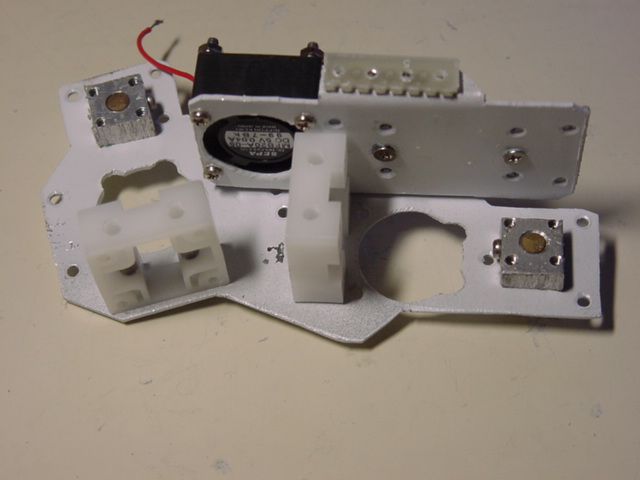
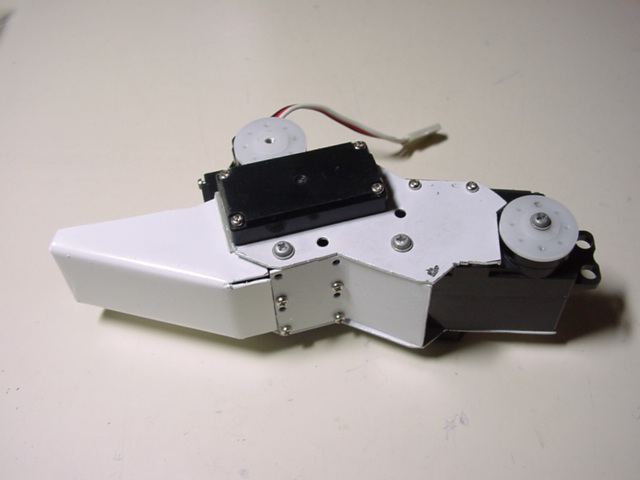
股関節の組み立て



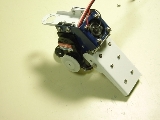
股関節フレームは、4パーツ構成になっています。組み立てると3パーツになりますが、RCサーボがないと維持できない状態になっています。そのため、RCサーボを外す時はバラバラになります。
で、今回無理して冷却ファンを股関節に持ってきました。そして、その下にサイドアーマーがきて制御基板をこのサイドアーマーの裏側に取り付けます。
配線のテンションがそれなりにあるので、追加工で穴を空けてバネを取り付けました。しかし、多少開き気味になっており完全に閉じることはありません。この辺りは次回設計するときに再度考えたほうがいいかも。
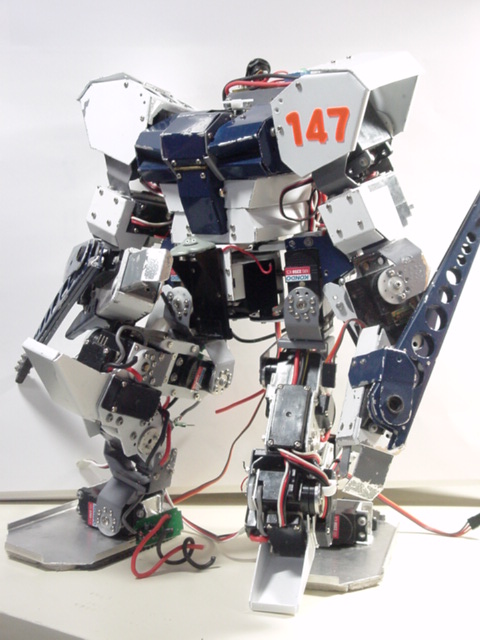
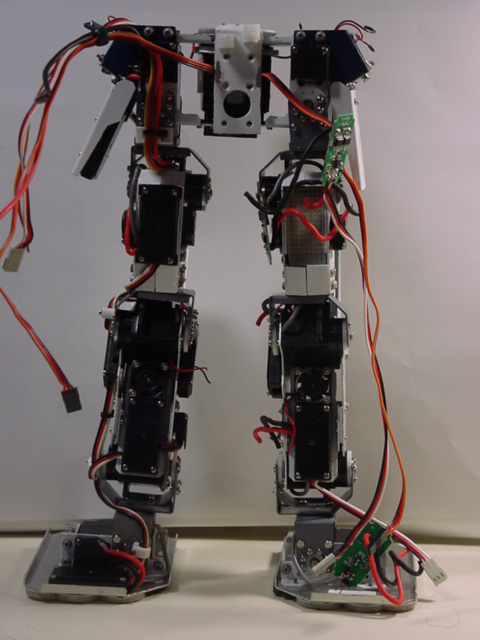
下半身の組み立て

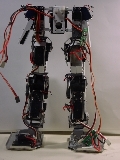

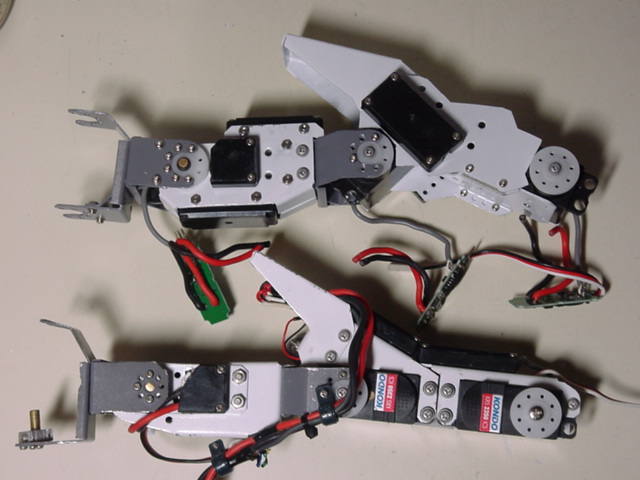
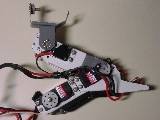
さて、未完成ではありますが換装後の足はこんな感じです。左足は配線を終了していますが右足はまだで、組み上げただけです。今回の配線は今までと比べて結構綺麗にできたと思います。
一度腿に配線を集中させており、電源はまとめ、信号線はフラットケーブルにそれぞれ変換しています。とは言え、裏蓋に入れられる(RCサーボの)3ピンコネクタの数は4つまでなので、股関節と腰はまとめられないのでそのままマイコンの方へ持って行きます。
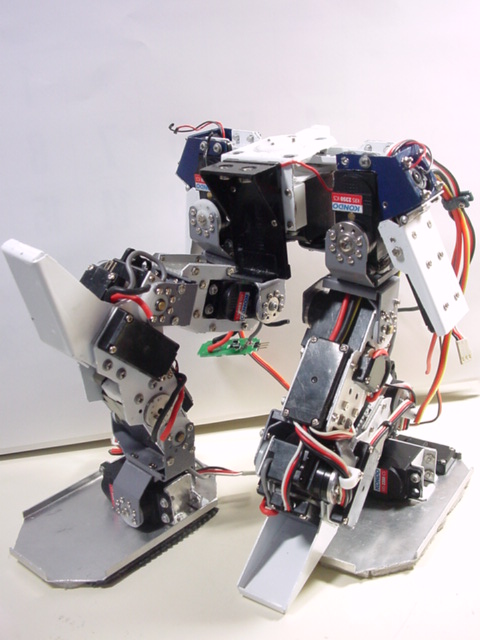
先日、膝は前後合わせて170°回せると書きましたが配線をした結果、前の方に倒せなくなったので稼動範囲は130°〜140°くらいになります。
しかし、今回は腿の前方への稼動範囲を増やしたおかげで膝立ちが可能になりました。今まではそれっぽい事はやったんですが、きちんとできたのは今回が初めて。まぁ、その代わり後方の稼動範囲が45°ほど減ってますけど・・・。(-_-;
参加費振込み
今日、参加費の振込みをした。でも、振り込んだのが15時以降だったので2月28日の振込みになるとのこと。ま・・・間に合った。いやいや、ギリギリすぎだ!
配線終了
左と同じように右足も配線した。ただ、ここで裏蓋の不足が発覚!今まで散々加工したり、切断したりしていたので予備がなかったりする。
去年買ったKRS-2350は軸付きボトムケースだからねぇ・・・制御基板だけを収める裏蓋としては大きすぎるのであった。
で、今日買いに行こうと思ったのだが秋月が休みなので、明日買いに行こうと思う。デバッグ作業がそう簡単に終わるとも思えないし・・・。
プログラムの修正及び移植作業
気が向いた時に作っていた新パルス発生プログラムのデバッグを行う。前回が2.5msecの間に送れる信号が8ビットだったのに対し、今度は16ビット送ることが可能に。最終的には、2.5msecの間に32ビット送れる予定。
また、信号生成関数もダイエットの結果小さくなった。でも、まだバグが残っているのでRCサーボが暴走する。どうも、計算結果がおかしそうなので、この辺りを探ってみる予定。
やることリスト
- 旧プログラムのHEWへの移植
- VB製モーションエディタの修正(バグ取り)
- 無線プログラム
- モーション作成
- 頭製作(設計含む)
モーション作成までの道は遠い。
16ビット化
ソフトのデバッグを行う。昨日の続きである、16ビット化作業である。どうやら、パルス生成関数にて計算間違いをしているようだ。あんまり時間が取れなかったので、ソースを印刷して早々に買出しに行くことにした。
買出し
電車内で、ソースと睨めっこをする。徐々に見えてくる間違い。そして、書き直していくうちにさらに短縮できることに気づく。最終的に、この短縮された方法を採用する訳だが元のソースの半分くらいに短縮ができた。
このまま、今までどおりに8ビット路線で行ってもよさそうである。現状では、16ビットが可能であれば16ビットで行いたいところ。
さて、話が脱線したが、買出しに行った目的は標準ボトムケース(軸なし)を買いに行くのが大半の目的。で、5Vの電源が消息不明なので、ついでに秋月で購入してきた。
RCサーボを使った実験が行えないので、ないと結構困るのだ。
続・プログラム
帰ってからも、頑張ってデバッグする。HTERMに直接数値を表示してデバッグして、計算結果が満足のいく値を得る。ひとまず、今晩はこれで終わりにする。気が付いたら夜中の3時だ。
最近、健康生活推進キャンペーン中の自分は12時、遅くても1時には寝るようにしているのだが、やりすぎた。自分の場合、夜更かししている時が一番時間を無駄にしている感じがしたので、早寝早起きでがんばろうとしているのだが・・・。
まぁ、それはさておき、明日は実際にRCサーボを繋いだデバッグを行うことにする。モニタ用のLEDの発光具合を見ると問題なさそうだが・・・果たして!
[BACK]
[TOP]
[NEXT]
Copyright (C) 2006 U-hirohito All rights reserved.