▼未だにポンチ打ち

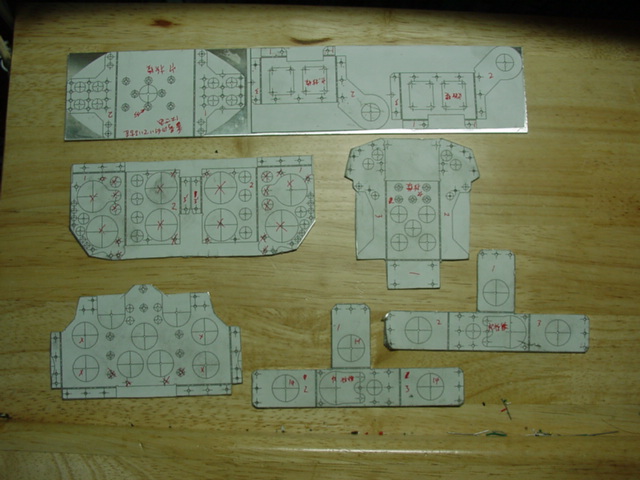
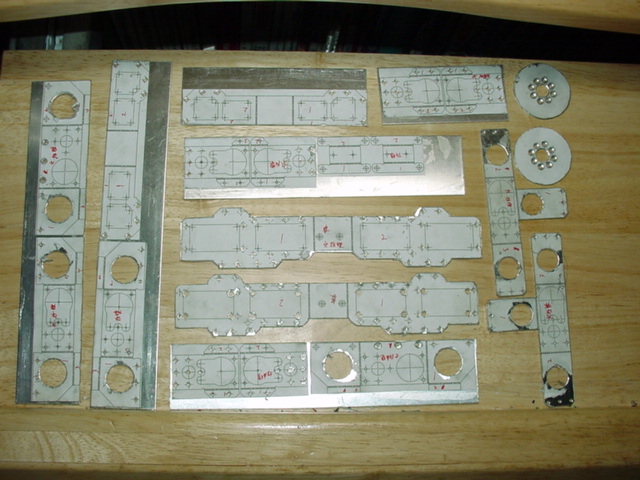
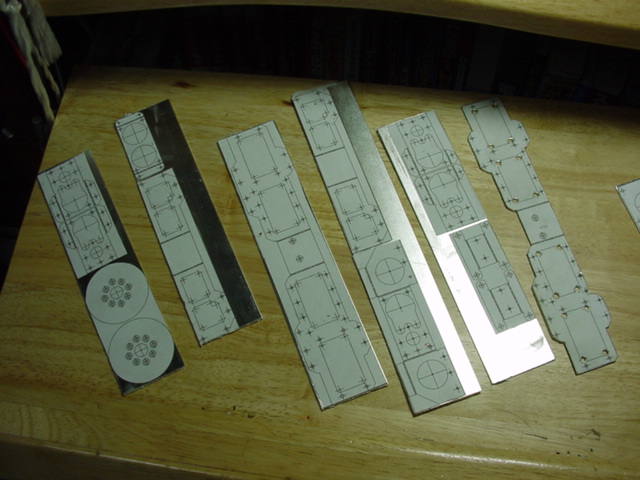
とりあえず、現在までにポンチ打ちが終わったアルミ材達。なんだかんだで時間が取れず。水曜日は、前日に徹夜という暴挙に出たのが原因で・・・
「明日の加工や、ROBO-ONEの事より、今は一夜の睡眠が・・・欲しい。」
バタッ・・・
と言う具合に倒れました。目覚めたときは朝でした。(ぉぃぉぃ)
どうも、徹夜というのは自分には合わないらしい・・・。(訓練が足りない?)
で、今日は今日で、おじちゃんの「今までお疲れ様パーティ」を開く。で、時間が取れず。最初に立てた、無謀な1週間スケジュールによると、今日の時点で全てのパーツ紙の貼り付け、及びポンチ打ちが終わっている。む・・・無理だ。(o _ _)o
無茶なスケジュールを立てれば進むと思ったが、そうもいかんらしい。もっとがんばれる方法を模索せねば。ポンチ打ちなんて、そんなに時間を取る作業ではないはずなのだが・・・。いかんせん、単調作業ゆえ、集中力がさらになくなってきているらしい。
ヒロ「この甘ったれヤローがー」( -々-)=○)゚O゚)グハッ
はぁ・・・小人さんとか黒いヤツがあれば・・・と思ってしまう。
[壁]_-) 「なら買えばいいだろう。」
(-o- ) 「そういうことは、隠れずに言え。つーか、そんな大金あるわけないだろうがぁ〜!」
[壁]-)フフ 「なければ作ればいいのですよ・・・」
( ≡_≡) 「ほぅ・・・どうやって?どうやるか是非教えて欲しいものだねぇ。」
[壁])┳※ 「この機関銃で、銀行なんぞを・・・」
\(>0<)/ 「おまえは、俺を悪の道に落としたいんかぁ〜〜!」
Σ( ̄□ ̄ )はっ!
いかんいかん・・・意識が・・・(^−^;
▼未だにポンチ打ち その2
さて、なーんかおかしいなと思われた方もいるかと思います。そう・・・ポンチ打ちの終わっているパーツが2つないんです。どこへ行ったのか・・・知りたい方もいるはず。実を言いますと、・・・私も知りたいんです。(T▽T)
そんな訳で、さっそく行方不明パーツが出てしまった。まぁ、穴の数が少ないし、切断も少ないからとりあえず良しとしよう。(と自分を思い込ませる私であった。)
▼そんな訳で・・・

残りあと2パーツのポンチ打ちが終われば、第一段階終了。第二段階は、この平板に収まらない大きさのパーツを幅50mmの平板に貼り付けて、また同様の作業を行います。遅い!遅すぎる!もっとスピード出さないと。そんな訳で、この二枚は今日中に片付けておきます。いや、寝る前に・・・ですね。(^−^;
で、前に81パーツ作らないといけないと言いましたが、実はそのうち16パーツは0.5mm厚のアルミで作る外装パーツなんですよ。つまり、付けても付けなくても、ロボットはちゃんと固定できる訳です。しかも、穴はほぼ無いに等しいし、切断も金切バサミでできるので、早く終わりそうです。
▼せっかくなので・・・
宣伝してしまおう!芝浦工業大学のロボット技術研究サークルにて、Jrに参加しようと頑張っているロボットがあります。そのロボットの名は、[J型装備extL](エクストル)です。製作者はチャンプ氏。Jrに参加するべく減量中だそうです。一応、歩行やその他の動作もあるので、興味のある方はどうぞ。
サークルページより、製作日誌を読めます。
▼昨日の結果は・・・?

そんな訳で、昨日はその後どうなったのかというと、宣言通り残りも全てポンチ打って、眠りました。おかげさまで、今も眠いのでした。(_ _ )zzzZZZ
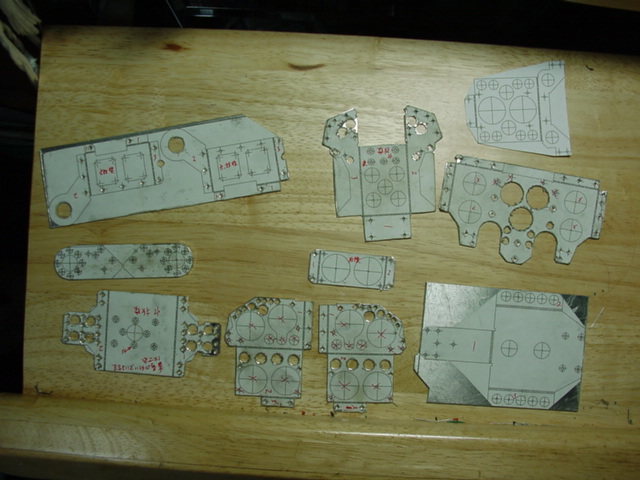
ところで、今回の写真には何やら赤文字が記入されていますね。いつの間についたんですかねぇ・・・って、私が付けたんですけどね。(−_− )ぉぃ!
今回のパーツは、折り曲げる部分の近くに穴が大量に空いているんで、もしも全て穴を空けた状態で折り曲げを行うとちゃんとした折り曲げができず、穴の辺りで折り曲がってしまうのです。そこで、赤いペンで予め、折り曲げる順番と折り曲げ後に空ける穴の位置を記してあるのです。
もう既に時間はないと言っても大げさではない時期に、作り直しは痛いです。しかも、穴あけ&切断が終わった状態での作り直しは、精神的ダメージがでかいのです。まぁ、一種の保険というヤツです。最善を尽くしてもダメなものはダメ。心配してもそれでミスが無くなる訳じゃないんです。
▼第二段階へ

悲しい事に未だにポンチ打ちです。1mm厚のパーツはまだたくさんあるので・・・。できれば、明日切断&折り曲げを済ませて、胴体の仮組みをし、ロボット王国へ持っていきたいものですが・・・。そのためには、胴体のパーツだけでも加工を済ませないと厳しいですね。
そんな訳で、ポンチ打ちはひとまず、ここまで!これから穴あけを行いたいと思います。ポンチ打ちと穴あけは実家でできますが、細かい切断や折り曲げは大宮校舎の部室でなければ出来ませんからね。さぁ、穴あけ開始!
21時03分記
▼穴あけ&ちょっとした切断完了

とりあえず、折り曲げる前に必要な穴あけ作業が終了しました。あとは現地で切断や折り曲げをするだけです。金きりバサミくらいでは、この辺りが限界のようです。それでも、これだけ切れるので満足ですね。
明日は6時に起きたいんですけど・・・無理かなぁ。それでは、おやすみなさーい。m(_ _)m
03時30分記
▼ダメダメだった。
日頃の疲れと、3時間で起きようという無謀な計画の影響で、起きたのは8時過ぎ。う〜ん、無理だったかぁ。8時50分の湘南新宿ラインで東大宮にある大宮校舎へと向かう。着いたのは10時。さっそく作業を始める。
切断は、ある程度やってあったので、そんなに作業量は多くなく、早めに終了。しかし、その後の穴あけが大量に残っているので、これがなかなか進まないんですよね。ロボット王国へ間に合うべく、作業進める。
結局なんだかんだやっていて、出発は18時50分。望みを掛けて出発し、到着したのは19時45分。すでに、誰も居ませんでした。まぁ、当然といえば当然なんですけど・・・(T▽T)
あと1時間早ければ・・・。
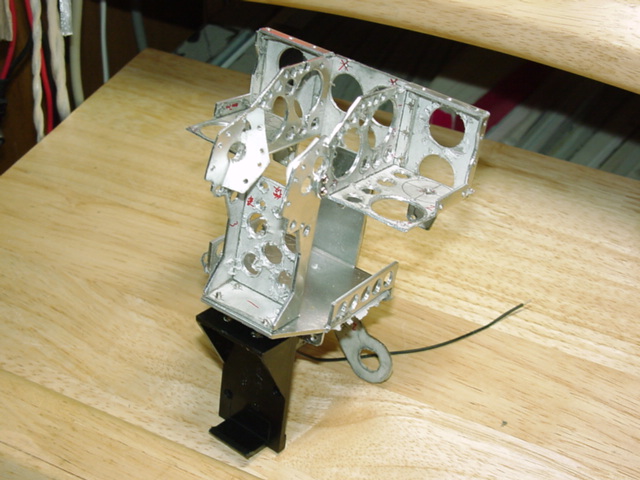
▼本日の成果 〜胸部編〜


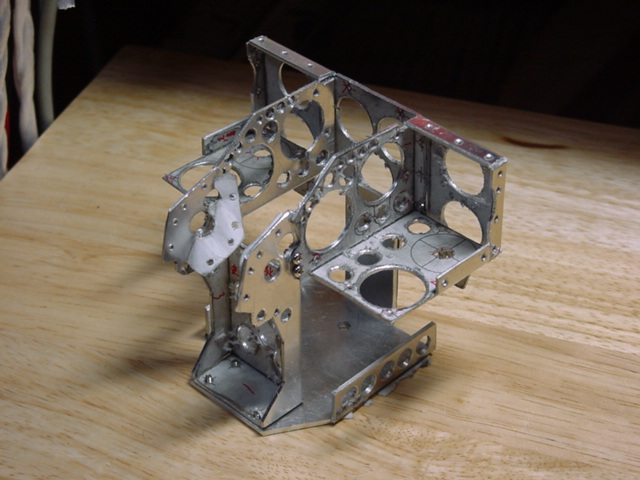
おかげさまで、なんとか胸部フレームが70%完成。残りは穴あけが終わっていないパーツと、紙を張り忘れたパーツ1個分です。外装パーツは、現地じゃなくても作れるので、加工はしていません。
だいぶ穴が空いていますが、RCサーボや裏蓋が付くので、強度的には問題ないはずです。0.5mmの余計なパーツが付くので、見えないパーツはなるべく肉抜きしたいところです。重量を測ってみたところ50gくらいでした。まだパーツが付くので、最終的には80gくらいになるかもしれません。
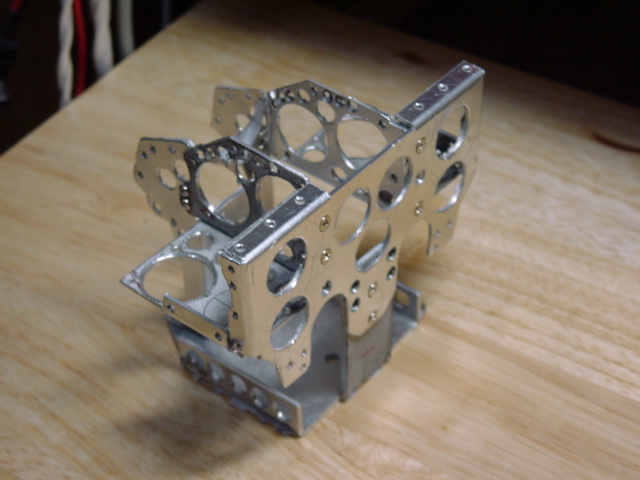
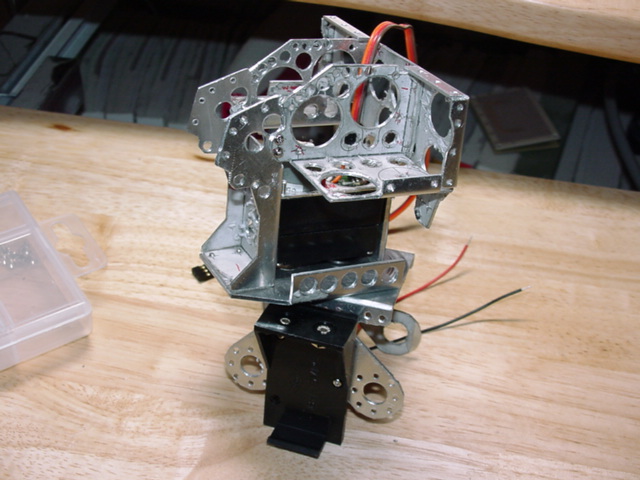
▼本日の成果 〜腰編〜


さて、次は腰ですね。現在のパーツ数は3個。あと2パーツほどありますが、合計で5パーツで構成されています。それでこの黒いプラスチックの塊は何かというと、マイコン電源用に使用する9V電池用の電池ボックスです。
前回のロボットは、付ける場所がなく、変な場所に取り付けてありましたが、今回はちゃんと考えて付けました。重たいものをなるべく腰付近へ集中させることできたかなと、思っています。それで、腰と胴体を付けるとあんな感じになります。
時間がないので、今週が勝負ですかね。
▼明日へ向けて・・・

明日は週に一度の部室へ行ける日。これ即ち、切断&折り曲げができるということ。それらの作業へ迅速に対応するには、必要な穴あけ作業を終えていなければならない。穴の空け残しがあると、その部品は折り曲げられないからだ。そんな訳で、φ1.5のドリルで大量の穴を空けたのでした。そうこうしているうちに、日も落ち夜になってしまいました。まだ作業が残っていると言うのに。意外と時間が掛かるものですね。で、今日の戦果はこんな感じです。大部分の部品は穴あけが終わりました。
とりあえず、今日はここまで!残りは明日加工しようと思います。限られた時間の中で、どこまで切断と折り曲げができるのだろうか。
▼胴体の仮組み


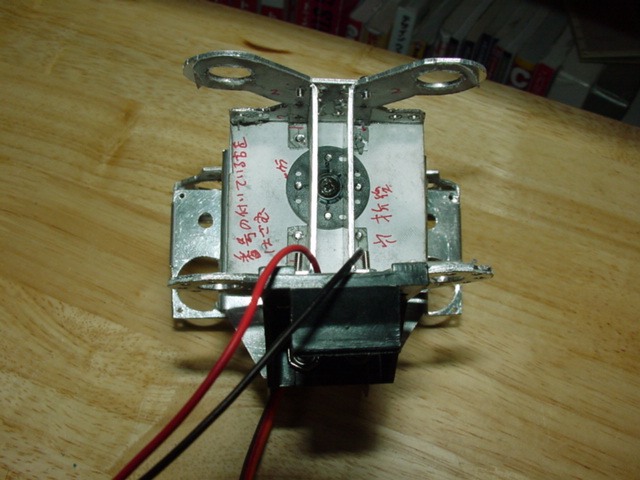
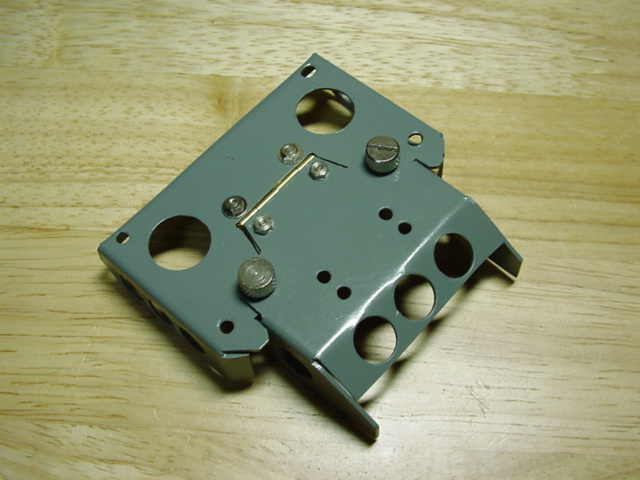
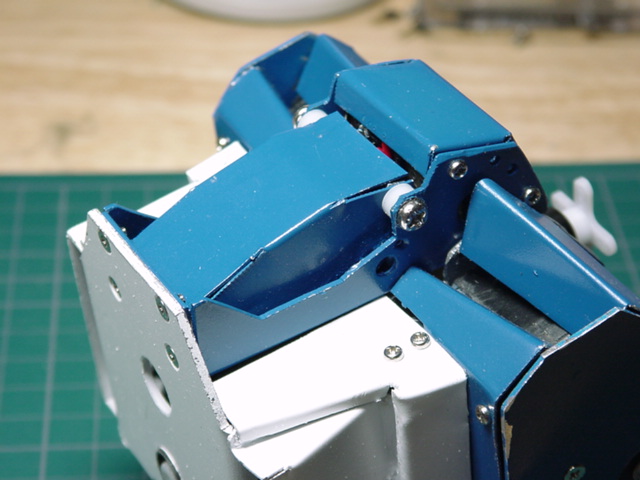
穴の追加加工や追加パーツができたので、こしの部分にRCサーボを付けて、腰の剛性を確認してみる。前回よりはだいぶ剛性がUPできたみたいです。腰に付いているのは、制御基板がバーニングしたGWS S03Tです。前回もS03Tをこの位置に使いましたが、今回もこれで行きます。


今のところ、この腰部分はあまり使わないので、スピードが遅くても対応できそうです。で、今回は、腰部分にフランジブッシュを使い、剛性をUPさせました。ちなみに、使用したのはオイレスブッシュ[写真左]の内径8mmのフランジブッシュです。
これをRCサーボと胴体の底板の間[写真右]に挟みます。ここでS03T付属のサーボホーンを使うと、サイズが合わないのですが、双葉のS3003用のサーボホーンがピッタリ合うので、これを利用します。

サーボホーンは、腰パーツに付いておりこれをはめます。するとサーボホーンはフランジブッシュを介して、アルミ板で支えられるので、ぐらつきが抑えられます。前回は腰が、すぐぐらついたので、苦労しました。これがうまく行けば、安定した動作ができそうな気がします。
見にくいかもしれませんが、胴体と腰の接続部分です。サーボホーンとフランジブッシュがちょこっと出ているのが見えるでしょうか?フランジブッシュは、左側の灰色部分です。
▼今日の戦果

加工して完成したのはこの6パーツ。内二パーツはさらに穴加工が必要。やはり、しばらく加工から離れていたため、電動糸鋸の扱いが下手になっている。刃を折る事はなかったものの、切断スピードが遅い!あの刃の折れた時の音は心臓に悪いので、かなり慎重になってしまっているのだ。
しかし、後半はコツを掴んだみたいで、スピードは速くなったが、タイムオーバー。次回に繋げるしかない。このままでは、完全に間に合わない。やはりここは腕パーツやら頭部パーツの設計を終わらせ、穴あけを自宅でやるしかない。とは言え、腕は未だに悩んでいた。腕で何か掴みたいのだが、なんとかならんのでしょうか?(^-^;
5号機に装備されたあの武器もちょっとパワーアップして搭載される予定。あとは自分の気持ち次第かな。とりあえず、大砲は見送りかな・・・。悩み中。
この写真のフレーム・・・どっかで見たことがあると言われそうだ。
▼ロボットパーティ行けず
本当は行きたかったロボットパーティも、とうとう行けませんでした。というのも、専門科目の機械工学実験のレポートの一つが今日中に提出されないと、1日経つごとに減点されていくという事なので、今日1日ひたすら大学から出られず。朝10時頃に行ったので、昼頃には終わるかなと淡い思いを抱きつつ向かいましたが、現実は甘くなく、結局16時45分に受け取ってもらえました。
提出しては、戻され、提出しては戻されの繰り返しになんとか勝利したものの、残されたのは睡眠不足と疲れでした。レポートをやっていたため、ロボットの進行はゼロ。や・・・やばすぎる。とは言え、単位には変えられないのも、また事実。
覚醒でもしない限り、ソフトとかモーションが間に合わないような感じです。
そんな訳で・・・いしかわさん、ロボットパーティ行けませんでした。ごめんなさい。m(_ _)m
▼またしても、更新止まる。
レポートやらなんやらで、結局作業は進まなかったのでした。どうも、お久しぶりです。ROBO―ONEの登録から早1週間くらいが経った訳ですが、加工作業は止まったままです。そんな訳で、その他の事を進めてみました。今回はせっかくなので、いろいろと紹介してみようと思います。では、どうぞ。
▼金曜日、買い物


はい、さすがにそろそろまずいので、必要な部品を購入しにいきました。上半身のアクチュエータも今回新しくするので、購入しておきました。Micro-MGと、懐かしのPS-2174FETです。 主要部分をパワーアップしつつ、軽量化し、スピードも向上。これが裏目に出るか、どうなるのかは分かりませんね。うまく行って欲しい。


で、ロボット王国でローハイトサーボホーンについて王様に話を聞かせて頂き、当初の予定では購入するつもりは無かったが、入手することにした。というのも、現状の設計ではRCサーボホーンと、フレームの間に、プラ板などを挟まなくてはいけなくなるのだ。 こいつを使えば、その作業は不要になる。これで時間を短縮できるというものです。もうひとつ、赤外線のトランシーバですが、これはそのうちやってみようと思います。
あとは、ここには載せませんでしたが、M2の皿ネジ、なべネジを西川で購入。準備は整った。
▼塗装

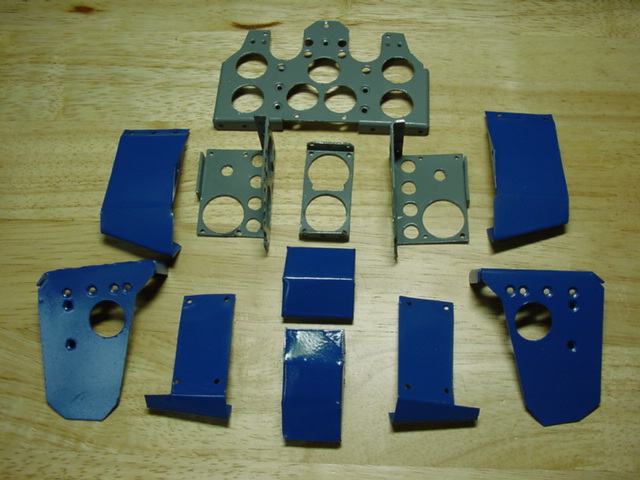
まずは、胴体パーツを・・・。ほとんど青いですね。まぁ、前回のロボットと同じようなカラーリングになるから当然ですが。(^-^;これで全部と言う訳ではありません。これだけでは、RCサーボを保持する事も不可能です。
では、次へ行きましょうか。

はい、次は前回のロボットから付けるようになったCPUカバーです。今、前回と言いましたが、そうなんです。前回より前のロボットはそんなもの無かったんですね。だから、倒れるとたまにマイコンがショートして死にました。良識ある皆さん、CPUカバーは付けましょう。(普通は付けてるって。)今回は、2パーツ構成になっていますが、それには訳があります。これについては、のちほど。

これは、腰のパーツです。あと1パーツなんですが、そのメインパーツは穴あけがまだ終了してないんで、塗装はしていません。それが来れば、完成なんですけどね。ちなみに、穴を間違えてφ1.5の所をφ2.0で空けてしまったため、作り直してるんです。
このミス、結構致命的だったんで・・・(^-^;

次ッス。胴体パーツの残り部分ですね。この白は、青色や灰色の後で塗装したので、若干撮影時間がずれてます。骨組みになるのは大きい1パーツのみで残りは飾りです。(^-^;まぁ、分かる人はどこに付くか想像できますよね。って、今までの日記にアルミ状態の仮組み写真があったっけ・・・(||| ̄□ ̄)
あ、いえ問題なんてありませんよ。問題なんて・・・(^-^;
▼バックパックのヒ・ミ・ツ

さて、最後にこのCPUカバー(バックパック)の説明です。見ての通り、丁番をつけてあるので、開閉できます。実はこのパーツは、充電池が飛び出すのを防ぐためのパーツでもあるんです。分かりづらいと思いますので、充電池が完成したら、またご紹介します。
前回のロボットは、充電池もマジックテープで付けるだけのお粗末な状態でした。

受信機も、マイコン用電池も、行き場を無くして、適当な場所にとってつけられているだけ。それではまずいと考え、今回はこの胴体にほとんどのパーツを収納できるようにしました。一応ネジ二本で固定可能であります。RC受信機もこのバックパックに搭載されたりします。今回は、マイコンボードが自作なんで、結構小さく作れました。失敗するとしたら、自作したマイコンボードのせいでしょうね・・・きっと。
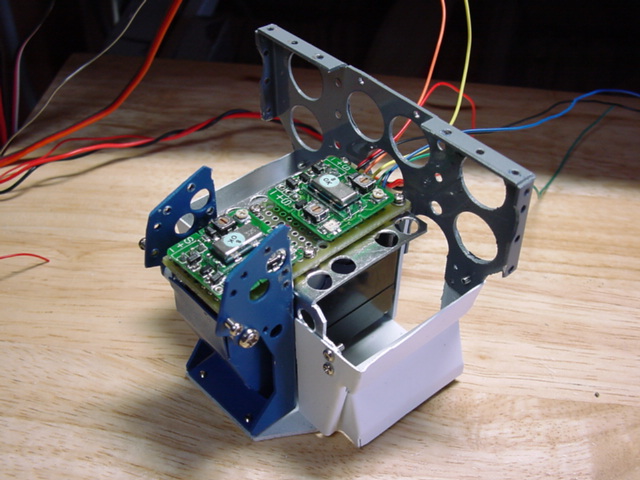
▼じゃいろ〜

前に購入したGWSのジャイロをついに搭載する時がきました。場所はこの辺です。結構悩みましたが、なんとかこのスペースを構築できました。当初は、ケースに入ったまま使おうと思いましたが、どう設計しても、入れるスペースがなかったんです。
たかが数ミリ、されど数ミリ。そんな訳で、最終手段。分解して再構築しました。何が問題かと言いますと、あの辺な出っ張りですね。箱状態なら楽だったんですが、デザインのせいで、取り付けしにくかったもんで・・・。ちなみにケース無い方がコンパクト。
時間が無い状態でできるか、分かりませんが、間に合えば、これで姿勢制御したいと思います。歩行が安定すると、非常に安心できるのですが・・・果たして!?
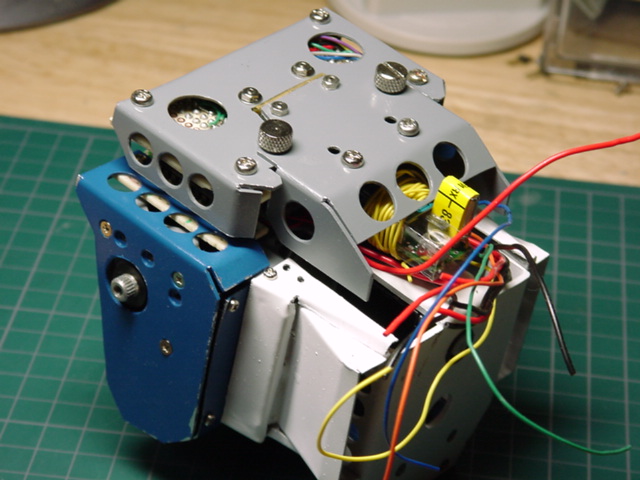
▼組上げ


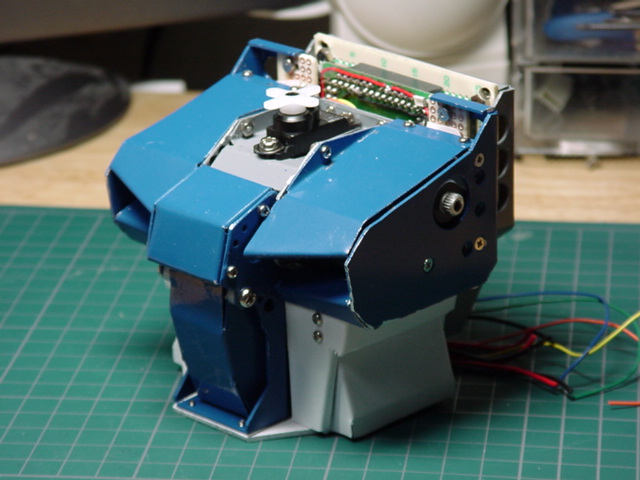
あっ!と思ったら、できてました・・・胴体だけ。(^-^;前回の胴体を元に再設計しているので、あんまり変わらないはず。カラーに関しては、コクピットが白から青へ変わったくらいです。
大概のパーツは付けたし、ある程度配線も完了しています。が、RCサーボの電源をどうまとめるか、未だに決まっていない。なるべくなら固定したいが、う〜む。
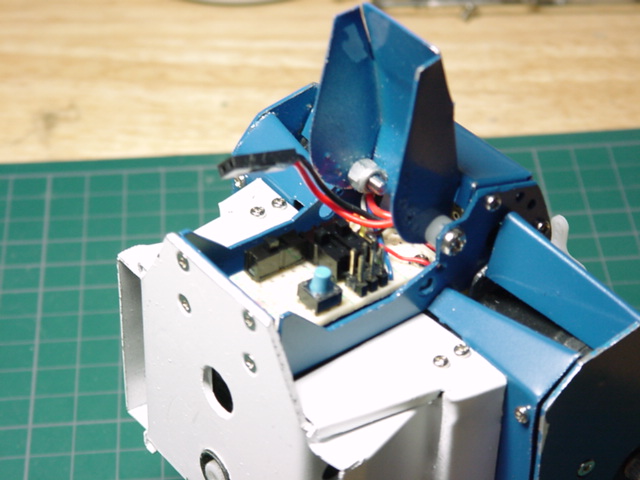
▼コクピット


ヴェークヴァイザ―のトレードマークになっているかは知りませんが、コクピット、今回も付いてます。しかも、今回はちゃんと可動範囲が確保されています。
「コクピットは飾りです。偉い人にはそれが分からんのです。」
という、名台詞をちょっと変えたようなのが聞こえてきそうです。当初の予定では、そのつもりでした。しかし、ある時、神が降臨。
「ユウは、スイッチ設置を閃いた。」
そんな訳で、スイッチ類、RS232C用端子を設置。無駄スペースをうまく活用。あとは、モーション製作時に使い心地はどうなのか?それ次第ですね。スイッチはともかく、RS232C用ケーブルが垂れ下がっている状態でも大丈夫なのか気になる所。まぁ、よほどひどかったら改善策を考える事でしょう。
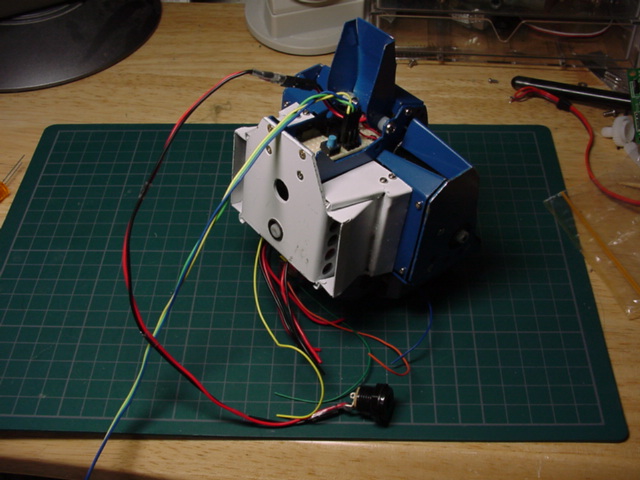
ちなみに、電源ケーブルや、シリアルケーブルを繋げると下のようになります。

もしかしたら、腰にも電源用ケーブルやRS232C用ケーブルを増設するかもしれません。実際その方が、モーション作成時に有効な気もしますし。マイコンのデータ書き換えや、調整時はコクピットからの方が楽かな。
それと余談ですが、新型自作マイコンボード、失敗しました。仕方ないので、前に作って成功した自作ボードを投入することが決定。まぁ、今更作っている時間、無いですからね。そんなことしてるくらいなら、ソフト作れと・・・(^-^;
ちなみに、旧型はちゃんと動きましたよ。(  ̄▽ ̄)
余談その2、胴体のアルミだけならば95gです。電池以外のCPUやジャイロ、RCサーボなどを含むと360gです。
▼頭部
二足歩行ロボットの頭、重要です。まさにロボットの顔(顔なんだから当たり前)。この頭次第で、ロボットの印象もずいぶんと変わると私は考えています。さて、うちのロボットも前回からちゃんとした頭がついた訳で、今回も付けようと思いますが、なかなか決まりません。うーん、困った。
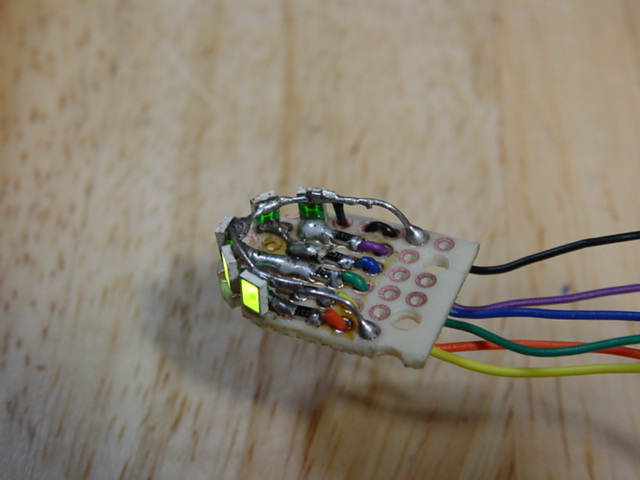
とりあえず、目の試作をしてみることに。

暗闇を照らす、緑色のヒカリ。コイツは一体なんなのか。敵か味方か!?(そういう問題ではないだろ。)せっかくなんで照明落として、撮影しただけです。(-_- )明るくして撮影したものは、下記に掲載しております。
ちなみに上下ともに、各画像をクリックすると動画が見られます。

と、言う訳で、その正体はチップLEDで作った目でした。(^-^;悪戦苦闘の末、この形を作る事ができました。実は、これより小さい赤LEDで最初作成していたのですが、結局うまくいかなかったので、ちょっと大きいこの緑LEDを使った訳です。
次回作る時は、もちっと数を増やしたいですねぇ・・・。

裏側から見た画像はこちらです。見てのとおり空中配線。(^-^;垂直にLEDを立たせるのが結構大変です。まぁ、チップLEDを扱えるようになったから、こういう芸当もできるようになったんですね。なかなか面白いです。
そんなこんなで、結局現実逃避なのか!?
いえいえ、そうではないですよ。あくまでも試作してただけです。(  ̄▽ ̄)
目はまだこれに決定ではないです。目候補って事で(^-^;
▼頭部続き

頭部の設計というか、デザインが終わったので、サクッと2時間ほどで作成しました。
前回のデザインを多少残しつつ、ネジの大半を隠す事に成功しました。前回は60%ほど
1mm厚のアルミで製作していましたが、今回は25%くらいしか使っていません。ほとんど
0.5mm厚で製作しています。まだ仮組みなので紙が残ってます。(^-^;
ついでに、前回製作した試作の目も搭載してみました。左の画像をクリックすると
動画が見れます。
前回は縦に長かったのですが、今回はバランスが取れたかな?と思います。ただ、こういうのは時間が経つと
どの辺が悪いのか見えてきます。出来立ては自己満足度が高いので、デザインの悪さが見えてこないものです。
前回も作りたては良かったんですけど、次第に縦に長い事が判明。なんかイマイチな感じでした。
もともと絵とか不得意なので、なかなか苦労してます。(^-^;
[BACK]
[TOP]
[NEXT]
Copyright (C) 2004
U-hirohito All rights reserved.
 とりあえず、現在までにポンチ打ちが終わったアルミ材達。なんだかんだで時間が取れず。水曜日は、前日に徹夜という暴挙に出たのが原因で・・・
とりあえず、現在までにポンチ打ちが終わったアルミ材達。なんだかんだで時間が取れず。水曜日は、前日に徹夜という暴挙に出たのが原因で・・・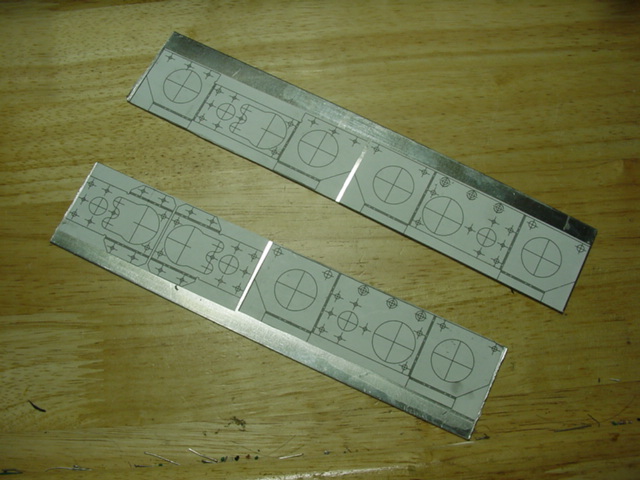 残りあと2パーツのポンチ打ちが終われば、第一段階終了。第二段階は、この平板に収まらない大きさのパーツを幅50mmの平板に貼り付けて、また同様の作業を行います。遅い!遅すぎる!もっとスピード出さないと。そんな訳で、この二枚は今日中に片付けておきます。いや、寝る前に・・・ですね。(^−^;
残りあと2パーツのポンチ打ちが終われば、第一段階終了。第二段階は、この平板に収まらない大きさのパーツを幅50mmの平板に貼り付けて、また同様の作業を行います。遅い!遅すぎる!もっとスピード出さないと。そんな訳で、この二枚は今日中に片付けておきます。いや、寝る前に・・・ですね。(^−^;