▼祝2万突破
更新をしなくなって2ヶ月経ちます。で、何時の間にか2万超えていました。どうもありがとうございます。最近レポートやら、レポートやら、レポートやらで手がつけられませんでした。今後もがんばって行きたいと思っています。よろしくお願い致します。m(_ _)m
▼近況ぉ。
さて、とりあえず最近の近況を・・・
基本的に進んではいないのですが、何やったかと言うと、次期機体の設計(現在第三案)、PIC(ちと浮気)、リトルバーニングコアの開発(主に半田付け)、H8/3052Fの自作、五号機のマザーボードの作り直し、二足のソフト(OS?)の修正等。
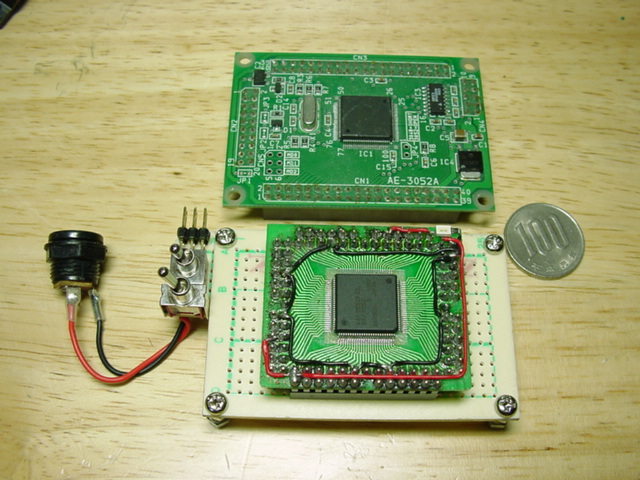
このうち完成したのが自作H8/3052Fだけです。「秋月で販売しているAKI-H8/3052Fがあるんだから自作の必要ないのでは?」と思われる方もいらっしゃるかもしれません。しかし、アレだと少々大きいのでスペースの問題とか出てくるんですよね。
でも、ピッチ変換基板の下にH8/3052Fに必要な機能を全て収めることができるので、これを利用する手はあり
ません。
自作したH8/3052Fの起動実験は、一応成功なのかもしれないのですが、動作がおかしいです。まずテストと言うことで、日立のモニターデバッガをROMに焼いたんですね。最初、下記のような文が表示されたので、成功だと思ったんですが・・・
H8/3052 Series Advanced Mode Monitor Ver. 2.2A
Copyright (C) Hitachi, Ltd. 1995
Copyright (C) Hitachi Microcomputer System, Ltd. 1995
:
↑電源投入後これが表示され、次にRAMへプログラムを転送するわけです。ところが、電源スイッチのON、OFF繰り返してみると、5回中、3回連続で表示されるのに、残りの二回は表示されないとか、表示されない事態が起こるんですね。ON,OFFの時間とかは関係ないです。
一回でうまく行くとは考えていませんが、目に見えないのでどこが問題かさっぱりです。




▼自作エイチハチ
今日秋葉原に買出しに行こうと考えていたので、買出しリストを作ろうとしていた時の事でした。そこで、
回路図を元にリストを作成していると、あることに気づきました。
リセットICで使っている抵抗は10KΩと47KΩだと思っていたんですが、回路図には10KΩと47Ωと書いてあり
ます。「しまった・・・この部分だ!」っと思いましたが、残念なことに手元に47Ωがないので、どちらにせよ
買出しには行かないとダメです。
▼思い込みとは恐ろしいもの
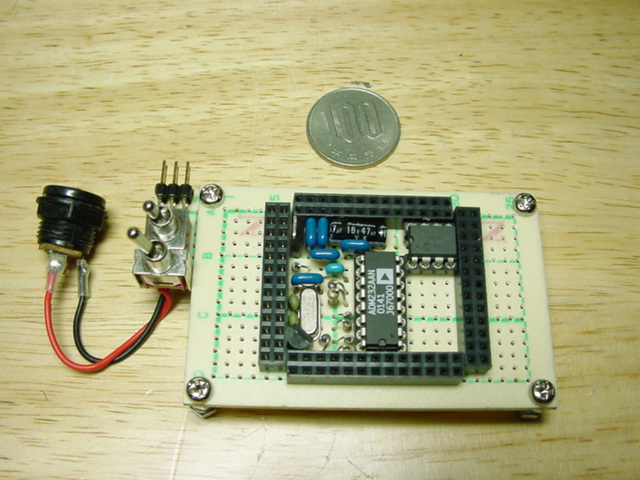
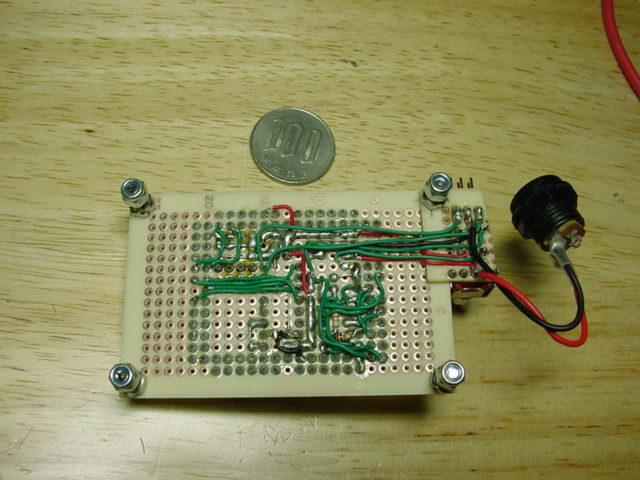
さて、買出しから帰ってきて、さっそく交換作業に入ります。っと思ったのですが、配線が邪魔で抵抗の交換だけ行うことができません。
う〜ん、面倒だけど・・・がんばるしかない!
で、交換後にスイッチをON-OFFしてみましたところ前回のような、一時的に表示されないという事態は全く起こらなくなりました。この一箇所をミスっただけで済んだのは意外とラッキーなのかも。もしも、起動実験でH8事態が死んだら、またしばらく開発を凍結しようと考えていたんで・・・。今度は抵抗やコンデンサーをチップにしようと考えています。
▼決意と・・・
1年前の日記を読み返してみる。今頃はすでに製作を始めていた。未だにパーツの一欠けらもできていない
私は、ある決断をする。そう・・・
「我が家にも、ボール盤の設置をっ!」
この戦況を打開するため、秘密兵器を投入な訳であるが、未だに設計も未完である。審査で落ちるなどあって
はならないし、今大会出場不可などもっての他である。
そんな訳で購入しに行こう〜。
▼いざケンマ−ト

自宅から、自転車で10分くらいの場所にホームセンターであるケンマートがあります。そこでは、なんとボール盤が7800円(定価)で売られていたので、これにしました。普通なら1万以上するので、安いほうかなと。
問題もいくつかあるんですよね・・・一つは重いということ。自転車の後方へくくりつけて運んだのですが、コントロール不能に陥りそうになりました(自分が)。自転車に乗って移動するも、ある程度スピード出てないとフラフラして危ないのなんのって・・・(乗るなよな)。
で、帰宅後さっそく組み立て、部屋の隣の小さな通路の隅に配置。これで穴あけし放題だ。ポンチ打ち → 穴あけの作業を自宅に確保。(^-^;

ボール盤のついでにロータリーヤスリ、強力セメダインを入手。セメダインは、アルミにも有効らしい。◎付いてたし・・・。
これが使えると色々とありがたいんですがねぇ〜。どうなることやら。(^-^;
▼とりあえず予定
6月30日までには最低でも加工が終わっていないとやばいですね。そんな訳でエントリー表には完成した機体の写真を載せまする。色は今回も青と白で・・・(^-^;
今回はセンサーを搭載するので、それらを駆使した制御もやらなきゃならん訳ですが、間に合うのかな・・。ともかく全力で突っ切るしかないわけです。自分は何をしたいのか、ロボットに何を望むのか、を確かめるために、立ち止まる訳にはいかない。
▼一応決めていた、製作完了日は・・・?
とりあえず、6月中に加工を終えたいなぁ〜〜〜〜〜〜っと、思っておりましたが、もう時間がありません。設計は伸びに伸び、こんな次期になってしまいました。一番設計に時間が掛かったのは、胴体。バッテリーやらジャイロやらサーボやらマイコンやらの配置に手間取りました。しかも、未だにマイコン固定用フレーム終わってないし・・・。
どうなるか不安ですね・・・。っと、前置きが長くなりましたが、結局いつまでに加工を終えようと思っていたかというと、6月30日の水曜日までです。
▼間に合うのか?
はい、あと二日です。無理です!(>□<)
明日中に、穴あけとかを終えないと、水曜日の作業で全てを終わらすのは無理ですね・・。休みならまだしも。
なぜ無理かと言うと、パーツ数の量が問題なんです。足から〜胴体までしか設計終わってないんですが、その量はなんと、81パーツ!察しの良い方は気づいたことでしょう。去年もなんだかんだ100パーツ越えてましたよね。今年の夏も、結局100パーツペースのようです。
▼ダブンッ(駄文「さむっ」)
さすがに、前回の5号機ほど、足のパーツは少なくなく、増えてます。う〜ん・・・まずいですねぇ(^−^;去年の2月、歩けるようになり大会でも予選に参加できるようになりました。それから何をすれば良いか、見失った状態、明確な目標の無くなった状態での設計は、何度も書き直し。今までは「歩く!歩ける!」これを達成すれば良かったのですから・・・。
段階的に動作ができるようになれば、こうもならなかったのでしょうけど、RCサーボの性能が良すぎたため、やりたいことを一気に消化してしまえたのが一つの原因でしょう。まぁ、自分のやりたかった事がどんなに少なかったか、想像力がいかに欠如していたのかを、あの5号機は私に教えてくれたのだと思います。
そう、第一段階は終わったんです。第二段階へと踏み出さねばならんのです。そのためにセンサーやら、特殊装置やら付けたりしていたので、準備に時間がかかっていただけなのです。毎年のことですが、それが仇となっているんですよね。だからこそ、今回は失敗しないよう、精一杯がんばらねばならない。
そろそろスポットライトを当ててあげないと、かわいそうだし・・・。さぁ、予選突破を目指そう!
そして、100パーツ加工の幕が上がるのであった。(T^T)
そうそう。今回上半身のRCサーボを一新するので、5号機の胴体だけ残りそうです。マイコンも自作だから、動かすこともできそうだ。そのうち、車輪でも付けて見るか。(^−^;
▼始まりし加工

いよいよ加工が始まります。加工もたっぷり、悩みもいっぱい、胸いっぱい。
モ○ラがぁー!黒いヤツがぁ〜〜〜!ほっすぃーーー!うがぁーーーー!
・・・間・・・
っと、現実逃避はともかくとして、やらにゃならん訳です。穴の数も出血大サービスだとか・・・。「んなサ−ビスいらんから安くしてー!」という気分ではありますが、まぁ、自業自得というヤツでしょ?(自分で言うな)
加工しなきゃ、物はできない。動かせない。遊べない。ならば作るしかないのです。しかも環境が最悪な状態で!こんなんでやってられっかー!!
ヒロ「ども!ヒロです。そんなお困りのあなたに良いものを買ってきてやった。ありがたく思うが良い。」
ユウ「なんか偉そうだな・・・(-_-;」

ヒロ「ジャーン!0.8mmのステンレスも切れるという金きり鋏だ。喜べ。」
そう・・・劣悪な環境というのは、切断手段が自宅にないということなのだ。そこで、ボール盤に続く秘匿兵器第二段!金きり鋏だ!コイツで、1mm厚までのアルミをことごとく切り刻んでやるのだ!まぁ、細かい切断は無理でも、これで糸鋸がなくとも、大部分の切断は可能になる。
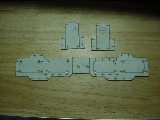
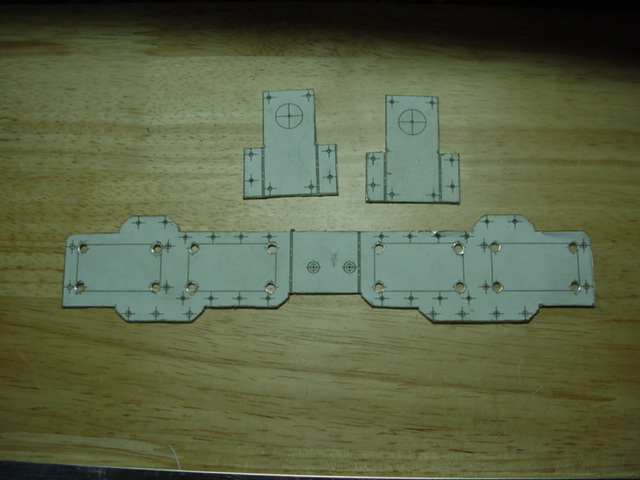
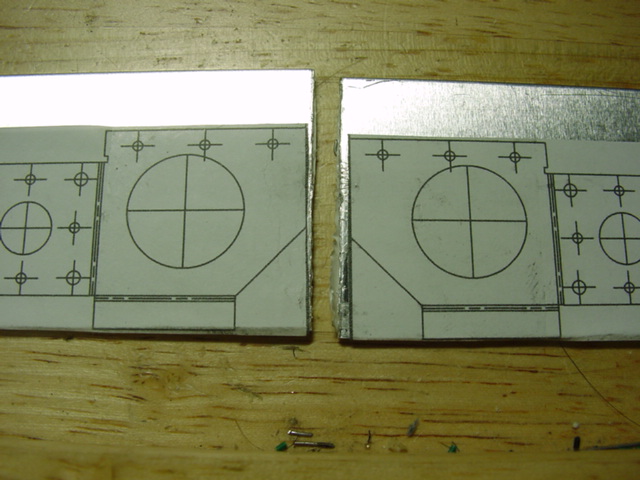
で、金きり鋏とヤスリを少々使用して出来たのが、この左の写真である。金きり鋏はちょっと使い方にコツが要りますね。経験地をもっと積まねば・・・。まぁ、電動糸鋸程、きれいな直線が難しくないので、意外と綺麗に仕上がりますね。ただちょっと油断すると、歪みやすいので注意。

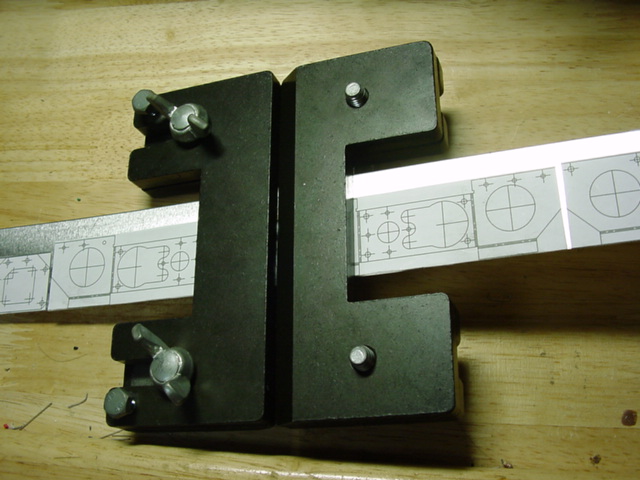
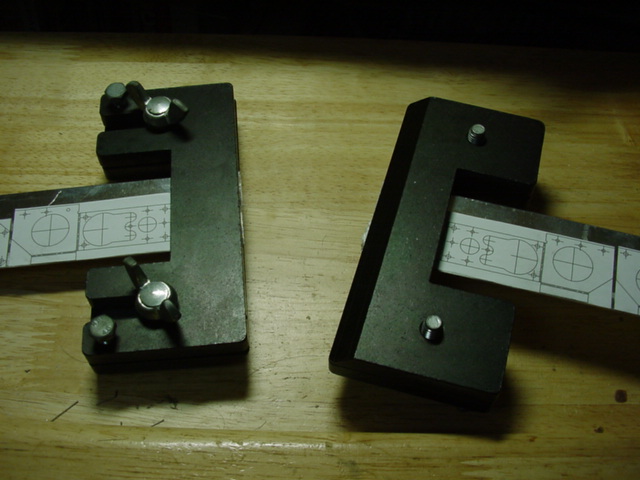
金きり鋏があるとは言え、これを使うと、片方は歪みに歪み使い物にならなくなります。それでは意味が無いので、第3の切断方法を試みるしかありません。そして、その第3の方法に使用する工具はこれです。
一時期イトーレイネツから販売されていたSimple Benderです。今まで埃を被っていま
したが、久々に働いて頂きましょー。ちなみに使い方は
onoさんのページにて紹介されて
いた方法を使いました。
ちなみに、場所はTOPページより
・曲げ機「Simple Bender」 → 「Simple Bender」でアルミを切ってみる
と行くことで、見れます。
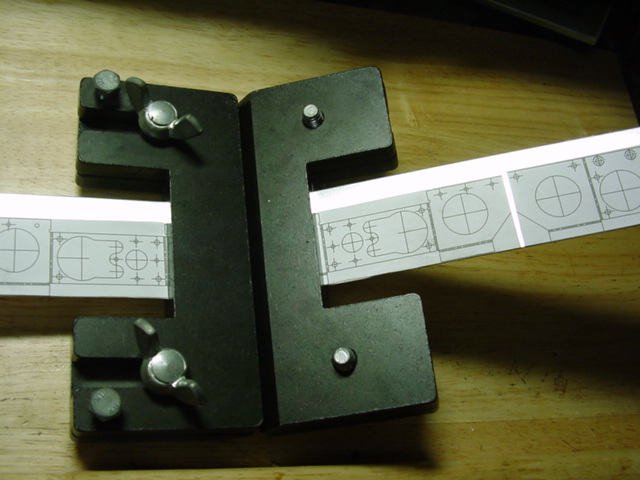
そして実際に行った写真を下に掲載します。左からセット、金属疲労開始、切断、切断面となっております。切断面を見れば分かる通り、綺麗な直線になる訳ではありません。私の場合は、この後ヤスリでこのギザギザの切断面をヤスリで整えて完了となります。



▼加工第一段階

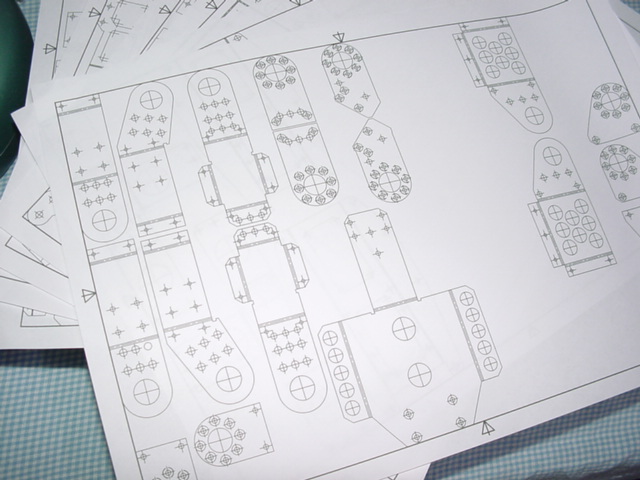
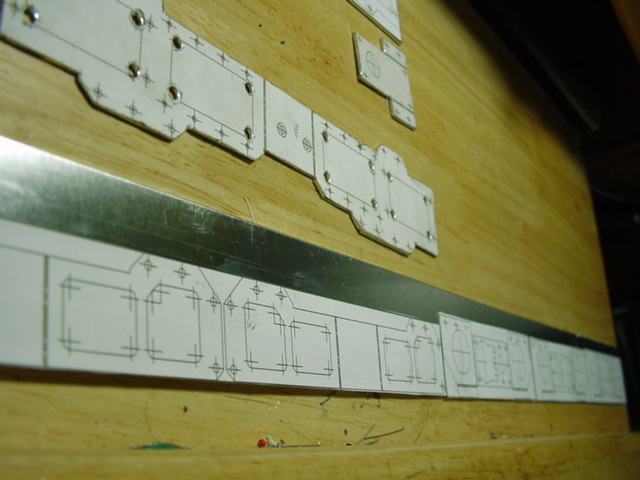
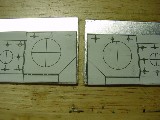
さて、お気づきの方もいらっしゃると思いますが、紙を張る対象は、大きなアルミ板ではなく、平板になっています。この平板使うのは3号機以来なんですよね。現在の設計では板はある程度ゴミとなってしまいますが、それでも予め片方が切断された状態であるが、切断の手間が省けるし、先ほど行った加工でコンパクトにする事ができます。
秋葉原のラジオデパート二階の
エスエス無線です。しかし、この板にも欠点はあります。第一に、厚さが1mm、2mm、3mmと1mm単位しかない。第二に、幅は最高で50mmまでである。第三に、1mの長さの物しか売ってない。という事くらいです。これらの条件に合うのであれば、この平板を使ったほうがそれなりに有利ですね。
もしも単純なサーボブラケットを作りたい方がいらっしゃるならば、20mm幅で1mm厚、もしくは2mm厚の平板を購入されれば、切断するのは2箇所のみなので、楽に量産できる事でしょう。

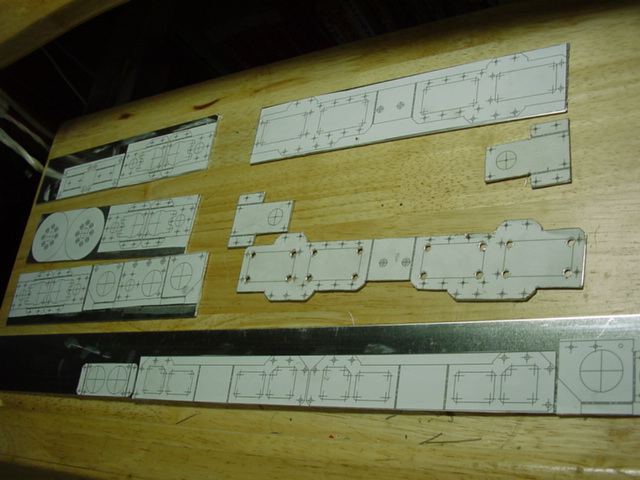
ロボットの部品も、なるべくこの平板で加工するように考えながら設計すれば、加工が
楽になりますね。実際3号機製作の時は、かなり楽でした。そんな訳で、この切り出した
パーツ全てにポンチ打ちせねば・・・道は長い。(T▽T)
[BACK]
[TOP]
[NEXT]
Copyright (C) 2004 U-hirohito All rights reserved.