▼東日本支部月例会
今日はマイクロマウスの月例会。昨日の飲み会のせいだろうか、昼過ぎまで寝てしまったので、慌てて出撃!
今回も、前回と同じように上光さんが、GCCの説明をしていた。色々便利な機能が付いているみたいだけど、使ってないのでなんとも言えない。(T▽T)
そもそも、OSがWindows Meなので、元からダメダメである。
CPLDからは完全に拒絶され、Inventor体験版も良く見れば2000等のNT系列。GCCは上光さんから95,98,Meの使用禁止命令も出ている。いいかげん、2000かXPに乗り換えないと危険だ。( -_-)
更に、レギュレーターの事についても説明されていた。レギュレーターはGNDに繋がないと、出力は入力と同じ電圧が流れるそうだ。う〜ん、怖いなぁ・・・電源入れたら、一発で昇天。(-人-)ナム
電子回路があまり分かっていないので、多少経験地UP。
終了後はお楽しみの「試走タ〜イム!」今回は、マウスを持ってこられている方が多かった。久我さんも、新型マウスを持ってこられていたので、拝見。部品がついた状態で見るのは今回が初めて!「低重心を追求したら、こうなった。」と言われていた通り、地面スレスレまで電子パーツが付いている。CPUも地面スレスレに付いている。カメラ持ってくれば良かった・・・(T▽T)
久我さんマウスは、基板で出来ているので、破損を回避するため、リセットボタンが、前面に二個付いていた。これで衝突時にリセットをかけて停止するのだそうだ。対策もバッチリ!昇圧を切った状態で走らせて頂けた。それでもそれなりのスピードが出ているから驚きだ。来月が楽しみ!
井藤さんもマウスを持ってきていて、探索モードで試走。相変わらず凄いスピードだった。途中、走行中に壁に接触したが、それでも問答無用でゴールを目指していた。普通ならば、接触すればどこかで引っかかってしまうもの。これがDCマウスの強さなのか!?
他にも色々あったのですが、昨日のお酒の影響か、頭痛がだんだんひどく・・・。というわけで、そのまま帰宅。頭痛がひどかったので、そのままダウンしてました。懇親会、行きたかったけど、身体の方を優先。次こそはぁ!
月例会に行って毎回思う。マウスを走らせたいっ!今年は、試験期間中にマイクロマウス講習が重ならなければ良いけど・・・7月26日,27日試験がありませんように!!\( ̄□ ̄ )
▼今回も凄かった。
前回も為になったが、今回も色々とお勉強になりました。m(_ _)m
未だに設計中の身なので、今から色々と組み込んで行くことにしよう。
(以下駄文)
当然、目指すのは上半身搭載状態の歩行。これは確実です。そしてぇ〜!生意気ながらも、バーニング宮田さんのバーニングスターと対決し、一撃を加えることなく、三倍のスピードで倒される事!>ぉぃぉぃ!!
フッ、負ける事には慣れているさ・・・>ぉぃ( ≡_≡)
慣れちゃ困りますよ。まぁ、どちらにせよ「戦える状態」ですからそれなりに歩けて、攻撃もそれなりにできる機体を作らねばならないと言うわけです。
現在の機体でも、下半身モードなら歩けるじゃないかっ!!
( ≡_≡)却下!ダメ!禁止!お前には無理だ。 Σ( ̄□ ̄;;)ガーン
筆者:有線での出撃は許可できん!無線操縦できたら良いよ。(バッテリーは搭載してなきゃダメ)
ユウ:いつ出られるんだ・・・( -_-)チッ
と言うわけで、頑張ってみる。(結構無茶な部分もあるから、失敗する可能性アリ)
(以上駄文)
▼設計〜いつ終わるの?私の勝手でしょぉ〜(バキッ)
冗談はさておき、なかなか進まないですね・・・設計。下半身は大体終わってるから、後は上半身のみ!今週の火曜日までになんとか仕上げたいもの。このままズルズルと引きずっていると、色々と影響が出てしまうから、早めに終わらせねばっ!と言うわけで、現在、腰〜胴体を設計中です。腰〜胴体に搭載すべき物は・・・
・H8マイコンorSHマイコン
・無線機(ラジコン用)
・ニッケル水素電池
・9V電池(マイコン用)
これだけ必要なんですね。カンファレンスでの話によると、重心は高い方が固有振動数が低いのだそうです。当初、足首近辺に配置しようと思っていましたが、カンファレンス後、腰に搭載することを決めました。
今回歩かない理由は、秋月の2A定電圧アダプターを使っていたせいだと、考えているので、電源周りを修正すれば動くはず!!これで歩かなかったら・・・どうしよう。( ≡_≡)
今は余計な事を考えず、どんどん行くのみ!\( ̄□ ̄ )
阻止限界点まで、あと何日?>ぉぃ
設計が出来てきたので、そろそろ加工作業に入ることになりました。足部分は、ほぼ完成状態なので、問題はないのですがその他の部分が・・・(^-^;
話が変わりますが、自分が所属している新型ロボットプランニング研究サークル(長いので以下略、新ロボ研)では、毎週火曜日と木曜日に進捗状況や技術交流などの発表会をしています。先々週に今月の予定を発表したのですが・・・???
6月 9日(月) 加工作業開始
↓
6月16日(月) 組み立て作業開始
↓
6月19日(木) プログラム開始(前回使用したプログラムの修正など)
↓
6月23日(月) モーション開始
ユウ:ふむ・・・これが予定表か( -_-)
筆者:なんとか、6月中にモーションの方へ入りたいのだけどね(^-^;
ユウ:今日は13日だよね?作業が4日遅れてるし、設計終わってないじゃん。
筆者:グサッΣ( ̄▽ ̄;;)
ユウ:フッ・・・歴史はまた繰り返す・・・か( ≡_≡)
筆者:グササッΣ( ̄□ ̄;;)
いやいや、組み立て作業が終了する6月18日まで終わらせれば大丈夫だ。(^-^;
7月に入ると、期末やらなんやらで時間がなくなる。当然、二足歩行ロボットやった日にゃぁ・・・
それ以上はツッコマナイデ下さい。
という訳で、今日から加工に入りました。
▼加工の時間があぁぁぁ〜〜〜

今日は様々なトラブルがあり、工場(もとい部室)へ行く時間が遅れてしまいました。さらに、部室の構造改革(机やロッカーなど)があり、時間がみるみる減少。
しかし、今回実施したおかげで、見た目も広くなったのでなかなか良い感じです。配置を変えるとここまで、広く見えるんですねえ。感激です。さて、結局どのくらい時間があったかというと・・・?

2時間30分。
作業時間、少ないなぁ・・・Σ( ̄▽ ̄;;)
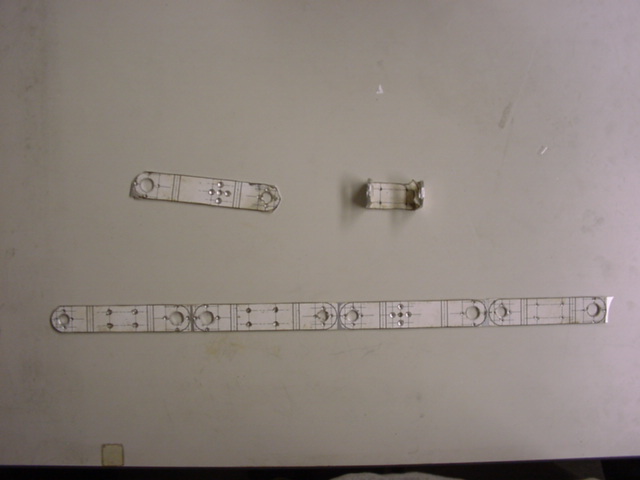
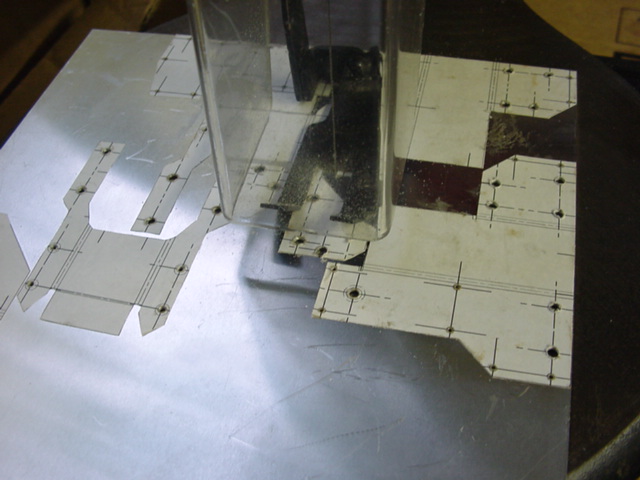
しかぁ〜し!今回から、「夢さん方式(印刷した図面を貼り付ける)」を実行。ケガキ作業時代とは比べ物にならないほど、作業スピードアップ!
そして、精度もアップ!ケガキ作業は精神力を削り、時間も掛かってしまっていました。後は、明日の作業スピードがどこまでアップするか次第ですね。
ケガキ時代は、3日で両足が完成しました。朝の8時30分から17時くらいまでが集中力の限界。17時以降はほとんど作業ができない状態に陥っていました。今回は果たして?
写真少しピントが合ってないみたいです。申し訳ありません。m(_ _)m
結局今日、完成した部品は1パーツのみでした。(^-^;
▼不眠症・・・なのか!?
昨日は、作業時間2時間30分という短さ・・・いかん!このままではいかん!という訳で、朝7時の電車に乗るべく、早めに就寝・・・のはずであった。がっ!なぜか寝付けず、ずるずると睡眠時間が削られていく!Σ( ̄▽ ̄;;)
結局3時間くらいしか睡眠を確保できずに出撃。う〜眠い(-.-)Zzzzz....

予定通り、8時30分に到着できたので、昨日完成できていないパーツを完成させるべく作業を開始する。約1時間30分で完成させることができた。さぁ、次だ次っ!
▼完成したら剥がします。


パーツは完成したら剥がします。なんで水につけるのか?たぶん、みなさんラベル印刷でやっていらっしゃると思います。それだと値段が高いので、普通紙に印刷してスティックのりで貼り付けてます。しっかりと接着してくれるので、ずれはありません。
さて、水につけてからどのくらいで剥がれるか。水につけてから3分〜5分くらいで、はがれました。意外と早いです。(^-^;何度も使っていると、だんだん水が濁ってくるので、適度に取り替えると良いかも?
▼戦いの末に・・・

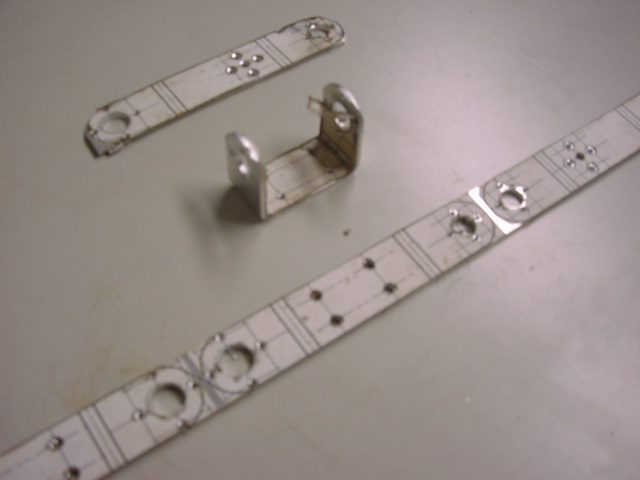
朝の8時30分〜夜の8時30分まで作業をやり、全44パーツが完成しました。もう、身体がボロボロです。しかし、4パーツの折り曲げ設計が失敗している事が発覚。そこで、他の折り曲げパーツを確認してみると、14パーツも失敗していました。う〜ん・・・また作り直しかぁ・・・(^-^;

しかし、今回の折り曲げはうまくいっていました。ケガキ時代では、毎回寸法が違ったので、驚きです。やはり印刷は強いです。
←失敗したパーツ
▼ホールソウ
今回、穴径17mmのホールソウを使ったのですが、なかなか穴を空けるのが難しいです。最初は順調なのですが、そのまま続けていると、徐々にブレがきて穴が広がってしまいます。そこで、ブレる前にひっくり返し、裏側から穴を空けたらうまくいきました。アルミが1000番台だからうまくいかなかったかのかもしれません。
▼ダメージを残しつつ・・・

またも寝付けず夜遅くまで・・・(^-^;
気が付いたら15時まで寝てました。( ≡_≡)寝すぎです。
日曜日でよかったというところ。(^-^;
さて、今日は足の仮組みをしてみました。前回と違い、意外とすんなりと組めます。ここでも加工の仕方が効いてきています。しかし、今回もまた組み立てが難しい設計になっていました。いいかげん、こういう設計とはおさらばしたいものです。
失敗したパーツがあったとはいえ、1日で40パーツ作れたので、今回は意外と早く完成させることができるかもしれません。さぁ、明日からまた足パーツ製作だ。
▼意外と脆いな・・・

何がというと、またも風邪なのか、異常に頭が痛いです。(いわゆる頭痛)これが風邪だと今年5回目(;^_^A あせあせ
人生の中でこんなに風邪をひくのは初めてではないだろうか・・・( ≡_≡)早く治したいものである。
▼援軍だぁ!援軍が来たぞぉ〜!

昨日Jinさんに輸入代行していた「オプティカル・センター・ポンチ」が到着しました。現在加工を始めてしまいましたが、まだまだ加工は残っているのでこれからバリバリ使っていけます。輸入代行を行って頂けたJinさんに感謝感謝です。
▼未だに足製作

今日は17時45分より加工作業開始。さっそく「オプティカル・センター・ポンチ」を実戦配備しました。覗いて見ると、自分が想像していたよりも拡大して見えました。他の人にも使ってもらいましたが、ずれはほとんどありませんでした。う〜ん、さすが「オプティカル・センター・ポンチ」!

で、前回失敗が発覚した10パーツ中2パーツが完成しました。残りのパーツは明日中に終わらせたいものですが・・・?果たして今週中に完成させることが出来るのでしょうか?(^-^;
そろそろ、RCサーボの基板を取り外して、アルミフレームと仮組みしなければいけません。二号機を解体するのは忍びないけど、やらなければっ!\( ̄□ ̄ )
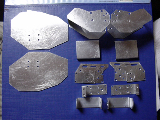
▼昨日の加工

1日遅れで掲載しております。修正版足パーツ6パーツであります。
二日前には穴あけまで完了していたので、その折り曲げをしました。
後は組んでみないと、わかりませんね。う〜む、うまく組みあがって欲しいけど・・・。
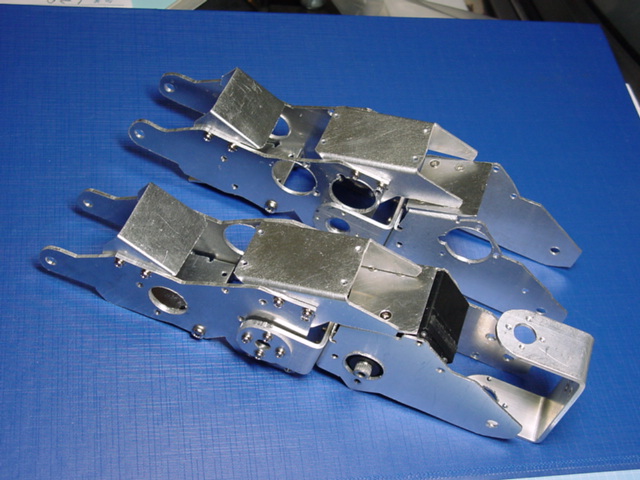
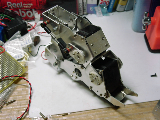
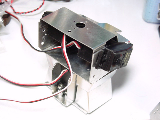
▼さらば、Wegweiser3号機

RCサーボを4号機で使用するので、解体前に記念撮影を・・・(^-^;
思えば、この3号機のおかげで色々な事を学ぶ事ができました。
今までありがとう・・・Wegweiser3号機。そして、さようなら。
注:後姿です。(念のため)
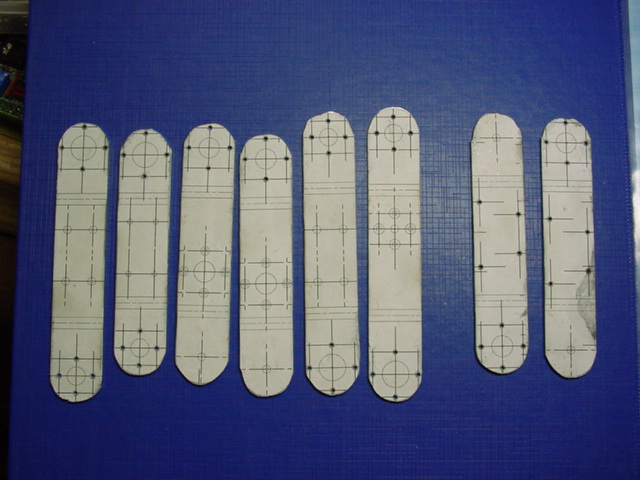
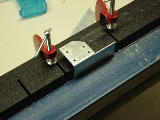
▼ちょこっと、製作手順公開(ポンチ打ち)

少し写真が少なかったので、「ちょこっと製作手順公開」になっています。まずはオプティカル・センター・ポンチで合わせます。
某プリンターのCMのごとく、「普通紙くっきり」であります。(意味が全然違うって・・・)

照準が合ったら、ポンチを挿入し、ハンマーで一発「ガンッ」と叩いてやります。普通のポンチを打っても、なかなかど真ん中になることはないですが、ピタッと印が付けら
れます。
▼ちょこっと、製作手順公開(穴あけ)

次に、ボール盤で穴あけです・・・が、写真撮るの忘れたので、ありません。(^-^;小さい穴から空けていくのですが、2mm以下の穴だと毎回大きいバリが出るので、その度にバリ取りしないと、作業が進みません。(^-^;
3mm以上ならば、小さいバリで済むのですが・・・やり方は、最初普通に掘っていき、最後の0.2mmくらいをゆっくりとドリルで掘り進めば、「スコーンッ」と薄いアルミカスが取れます。バリも、高さ0.1mmくらい?(見た目)なので、特に問題なく次の穴を空けにいけます。
う〜ん・・・よく分かりませんね。(^-^;
でかい穴(7mm以上?)も、ゆっくりと穴を空けていると、だんだん揺れてきて穴がいびつになりやすいのですが、アルミのカスが繋がるくらいの速度で穴を空けると、意外ときれいに空きます。(最初4mmくらいの下穴を空けてからでないと、うまく空きませんが・・・)
▼ちょこっと、製作手順公開(切り出し)

そして、電動糸鋸でパーツの切り出しです。穴あけの時は、穴の数は多いし、バリ取りもしなければならないので、時間がかかりますが、こちらはスムーズに切断できます。去年の夏に使っていたときは、「ポキポキッ」と良く刃を折ったものです。その度に、物凄い音を立てるので、しばらく「電動糸鋸恐怖症」になっていました。(^-^;
しかし、3号機製作の折に、刃にあらかじめ油(KURE55-6)を塗っておいたら、それ以降一回も折っていません。最近は安心感もあるのでスピードもそこそこ上がってきました。結局、使い方がダメだったんですね。(;^_^A あせあせ
▼ちょこっと、製作手順公開(折り曲げ)

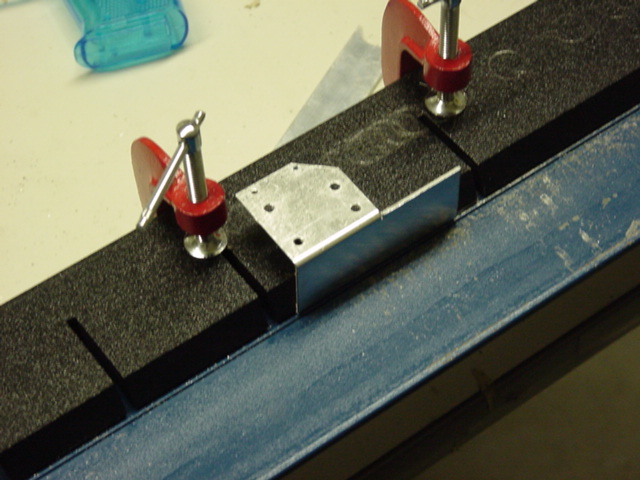
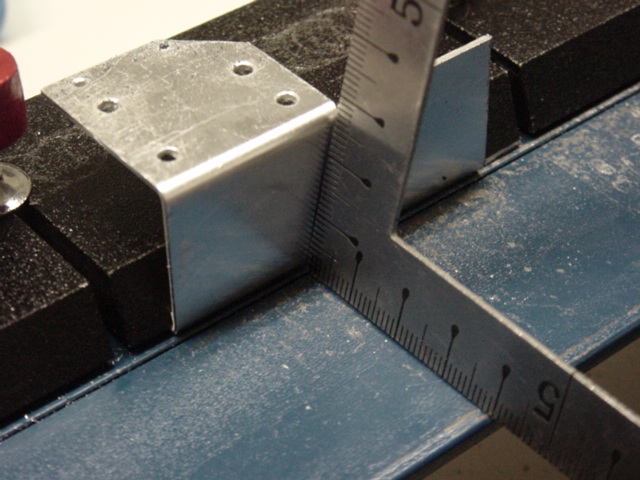
最後に折り曲げです。3号機製作時は、ケガキで線を引いていたし、「アルミの圧縮、伸縮」を考えずにやっていたため、毎回違う結果ばかり出ていました。(^-^;しかし、今回はちゃんとやっているので、ズレはほとんどありません。さすが、印刷です。
そして、90°にちゃんと折り曲げがされているかを、定規を当ててチェックをし、折り曲げ終了です。やはり、折り曲げがされているパーツは見栄えが良いように感じます。(^-^;
▼腕パーツ製作
今日はあまり作業が進みませんでした。もうちょっとスピードを出したいものです。
現在頭痛と格闘中・・・(^-^;
で、腕パーツですが、今日は6パーツ完成させられました。今回は腕パーツもちゃんと製作しているので、腕ナシ・・・にはならないはず。(^-^;
腕は飾りですっ!・・・(以下略)
のようなセリフは聞かなくて済むはず・・・(^-^;
比較用に、装着することになるRCサーボ「双葉製S3003」を置いてみました。大きさはこの程度です。
▼仮組み(ネジなし)
RCサーボをはめ込むと、こんな感じになります。この腕パーツはあと2パーツで完成します。残りの2パーツは色々な物を装着できるように、穴が大量に空いています。(^-^;何をつけるんだか・・・( -_-)
RCサーボをはめ込んでみたところ、特にズレはないので、加工は成功しているようです。図面がなぜ見えるかというと、時間の都合上剥がせませんでした。(^-^;
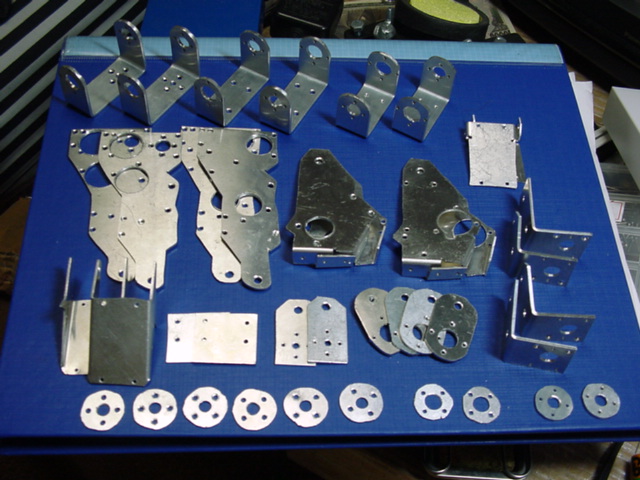
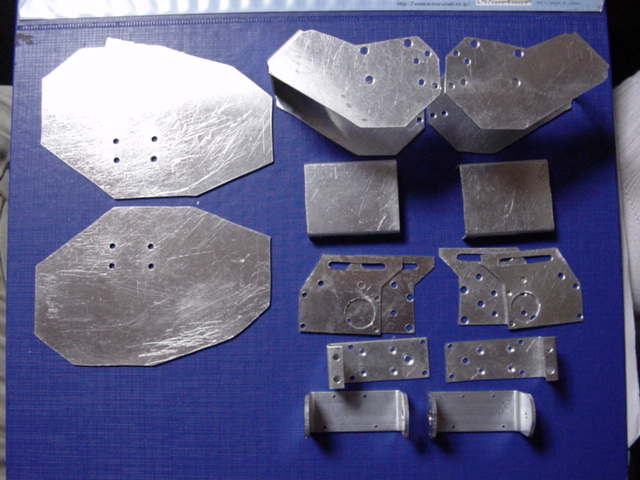
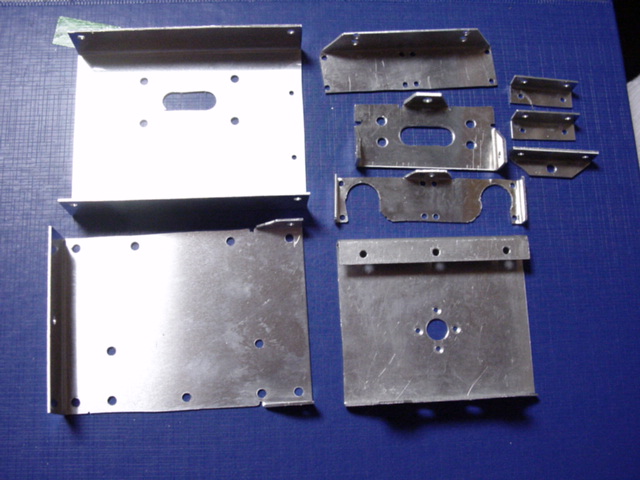
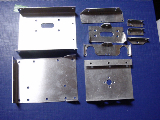
▼全パーツ
組みあがっているパーツを写してみました。まだ全然できてませんね。(^-^;スケジュールも大幅に遅れ気味・・・もうちょっとスピードアップが必要でしょう。明日もがんばって加工をしなければっ!
▼片足にRCサーボを搭載


パーツがはまるかどうかをチェックすべく、RCサーボを入れてみました。結果は問題ナシ。ふぅ、これで作り直しは免れるかな・・・(^-^;
今回は、工作精度が良いのでほとんど作り直す必要がありません。ただ、今回は設計ミスが多いせいで、失敗作を結構作ってしまってますね。ややこしい事をするからこうなるのです。たぶん、前回よりもパーツ数と穴あけ数も増えているのではないかと・・・(^-^;
▼屈伸(静止)
とりあえず、組みあがったのでちゃんと曲がるかどうかチェック。予定通り曲がる事ができました。この足は約136°くらい膝を曲げられるようになっています。この状態までの深い屈伸を実現したいですが、果たして!?
前回は膝以外の関節の可動範囲が狭かったので、深い屈伸が不可能でした。
▼腕は?

前回に引き続き、3パーツほど新たに完成。あと3パーツくらいで、片腕は完成します。新規に作った3パーツ中の1パーツは、無茶な折り曲げをしてしまいました。折り曲げ時に、折り曲げ機を使えない箇所多数。想像していたよりも2箇所増えてしまったのが計算外。出来は・・・どうだろうか。( -_-)う〜ん
▼もう少し進んでいます。
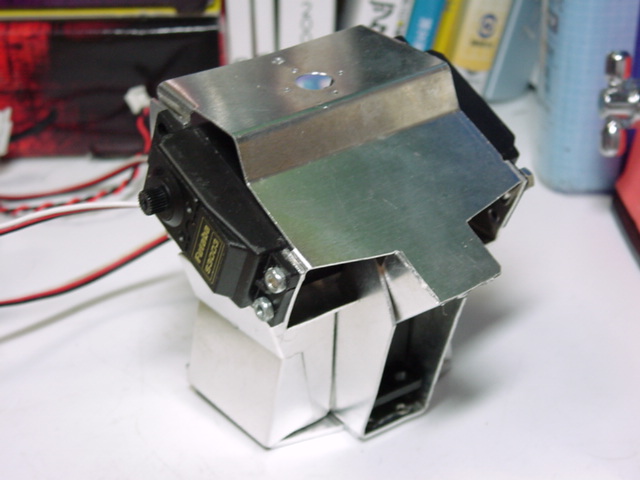
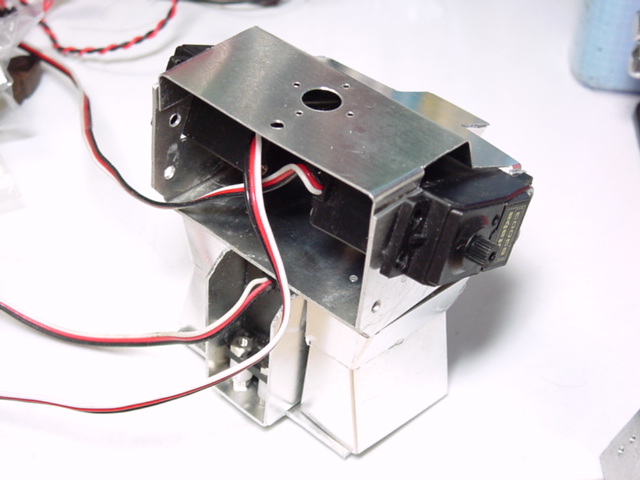
胴体パーツもある程度できています。ここでも無茶な折り曲げが!?Σ( ̄▽ ̄;;)しかし仮組み後、穴あけの設計ミスが発覚。RCサーボを止める穴がずれてました。これは、片方の穴を削るしかないのか。(穴を削るだけで対処できるのだから、まだマシか。)
ちなみに搭載しているRCサーボはS3003が3個です。
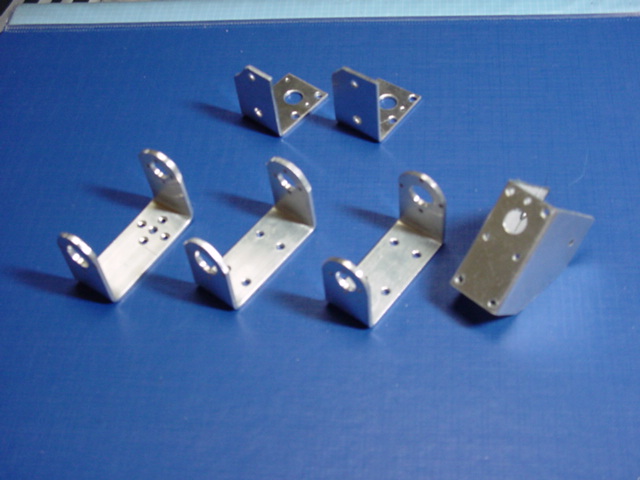
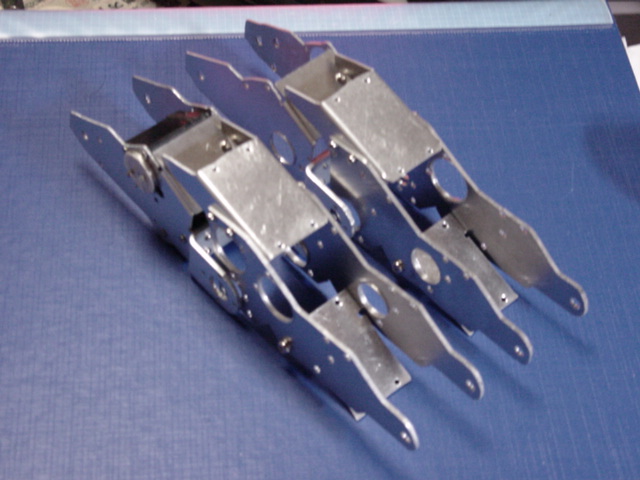
▼全パーツ・・・完成
ようやく、全パーツ完成しました。これで組めば起動できるはずです。
数えてみたら、アルミパーツは全部で95個でした。穴の数は・・・
数えたくないほど空けた気が・・・(^-^;
長かった・・・だが、戦いはこれからだ\( ̄□ ̄ )
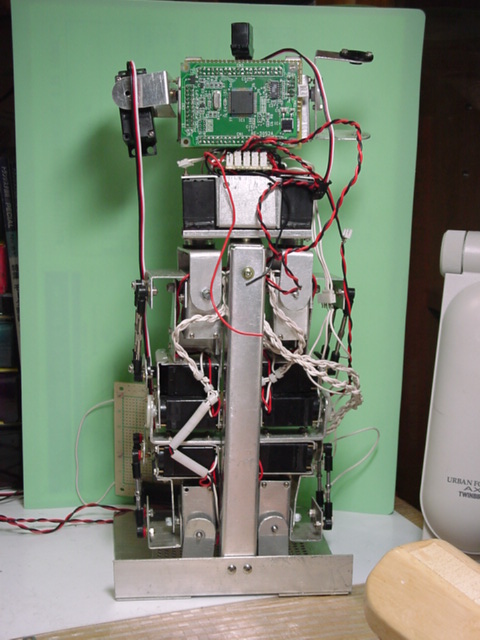
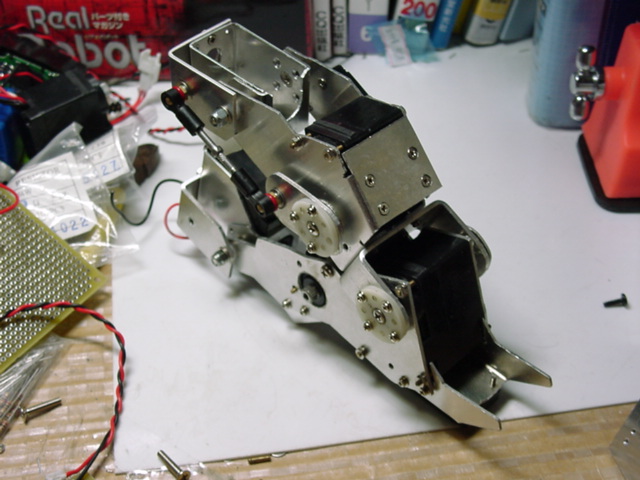
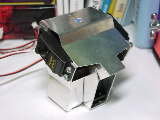
配線・・・配線・・・う〜む、起動まであとどのくらいだろうか・・・
写真1枚目は、腕と肩周辺です。重かったらはずさないとなぁ・・・>肩
二枚目は胴体&バックパック(マイコン用)です。
▼制御基板・・・応答、ありませんっ!

FETを繋いでやってみましたが、まるっきり応答なし・・・というか、電源を入れただけで、回転を始めてしまう始末。これは、宮田さんに教えてもらった現品.COMで入手してみるっきゃないっ!ちなみに、写真はS3003の制御基板に繋いだものです。問題なく動きました。こうなれば、これで行くしかない!?
▼今後のご予定は?
死んだと思ったモーターが生きていたので、何が何でも使ってやるしかない!それが散っていった物達(PS-2174FETの制御基板2枚ほど)のせめてもの手向けだ。後は組むのみ!がんばろう。
[BACK]
[TOP]
[NEXT]
Copyright (C) 2003 U-hirohito All rights reserved.