丂仭 嬤摗壢妛惢柍慄僐儞僩儘乕儖儐僯僢僩偺庴怣婡傪儅僀僐儞偲宷偘傞丅
丂ROBO-ONE偱偼偍撻愼傒偺RC僒乕儃丄儘儃僢僩僷乕僣傪斕攧偟偰偄傞嬤摗壢妛傛傝丄KHR-1傪柍慄偱憖廲偱偒傞偲偄偆柍慄僐儞僩儘乕儖儐僯僢僩偑敪攧偝傟傑偟偨丅崱夞偼偙偪傜偺柍慄僐儞僩儘乕儖儐僯僢僩傪儅僀僐儞偵愙懕偟丄儘儃僢僩傪憖廲偟傛偆偲巚偄傑偡丅
丂仴 柍慄僐儞僩儘乕儖儐僯僢僩偭偰偳傫側傕偺丠
 丂塃懁偺幨恀偑柍慄僐儞僩儘乕儖儐僯僢僩偱偡丅戝偒偄曽偑憲怣婡丄彫偝偄曽偑庴怣婡偱偡丅憲怣婡偵偼D-SUB俋僺儞偺僐僱僋僞偑晅懏偟偰偄傞偺偱丄偦偺傑傑宷偘傟偽OK偱偡丅庴怣婡偺曽偼丄RCB-1偺掅懍僔儕傾儖愱梡偺僐僱僋僞偵愙懕偡傞偺偑杮棃偺巊偄曽偱偡丅
丂塃懁偺幨恀偑柍慄僐儞僩儘乕儖儐僯僢僩偱偡丅戝偒偄曽偑憲怣婡丄彫偝偄曽偑庴怣婡偱偡丅憲怣婡偵偼D-SUB俋僺儞偺僐僱僋僞偑晅懏偟偰偄傞偺偱丄偦偺傑傑宷偘傟偽OK偱偡丅庴怣婡偺曽偼丄RCB-1偺掅懍僔儕傾儖愱梡偺僐僱僋僞偵愙懕偡傞偺偑杮棃偺巊偄曽偱偡丅
丂偙偺庴怣婡偺晹暘傪RCB-1偱偼側偔丄儅僀僐儞偵愙懕偟傑偡丅崱夞巊梡偡傞儅僀僐儞偼丄姷傟偨廐寧偺AKI-H8/3052F傪巊梡偟傑偡丅
丂仴 庴怣婡偵擖椡偡傞揹尮摍偺攝抲
奆偝傫偼丄晅懏偺RC僒乕儃梡偺働乕僽儖傪巊傢傟傞偲巚偄傑偡丅偙偺働乕僽儖偺怓偼偦傟偧傟乽敀丄愒丄崟乿偲側偭偰偄傞偲巚偄傑偡丅RC僒乕儃偱偼丄敀偼PWM丄愒傪Vcc乮亄乯丄崟傪GND乮-乯偲偟偰巊偭偰偄傑偟偨丅庴怣婡傕偙傟偲摨偠偱丄敀傪TXD乮弌椡怣崋乯丄愒傪Vcc乮亄乯丄崟傪GND乮-乯偲偄偆峔惉偵側偭偰偄傑偡丅
丂憓偟娫堘偊傞偙偲偼柍偄偲巚偄傑偡偑丄乽庴怣婡偺働乕僗偑戝偒偄偐傜暘夝偟偰巊偆乿応崌偼丄憓偟娫堘偊傞壜擻惈偑偁傞偺偱廫暘婥傪偮偗偰偔偩偝偄丅憓偟娫堘偊偨偐傜偲尵偭偰夡傟傞偙偲偼側偄偲巚偄傑偡偑丄桘抐偼嬛暔偱偡丅
丂ROBO-ONE偱偼偍撻愼傒偺RC僒乕儃丄儘儃僢僩僷乕僣傪斕攧偟偰偄傞嬤摗壢妛傛傝丄KHR-1傪柍慄偱憖廲偱偒傞偲偄偆柍慄僐儞僩儘乕儖儐僯僢僩偑敪攧偝傟傑偟偨丅崱夞偼偙偪傜偺柍慄僐儞僩儘乕儖儐僯僢僩傪儅僀僐儞偵愙懕偟丄儘儃僢僩傪憖廲偟傛偆偲巚偄傑偡丅
丂塃懁偺幨恀偑柍慄僐儞僩儘乕儖儐僯僢僩偱偡丅戝偒偄曽偑憲怣婡丄彫偝偄曽偑庴怣婡偱偡丅憲怣婡偵偼D-SUB俋僺儞偺僐僱僋僞偑晅懏偟偰偄傞偺偱丄偦偺傑傑宷偘傟偽OK偱偡丅庴怣婡偺曽偼丄RCB-1偺掅懍僔儕傾儖愱梡偺僐僱僋僞偵愙懕偡傞偺偑杮棃偺巊偄曽偱偡丅丂偙偺庴怣婡偺晹暘傪RCB-1偱偼側偔丄儅僀僐儞偵愙懕偟傑偡丅崱夞巊梡偡傞儅僀僐儞偼丄姷傟偨廐寧偺AKI-H8/3052F傪巊梡偟傑偡丅
奆偝傫偼丄晅懏偺RC僒乕儃梡偺働乕僽儖傪巊傢傟傞偲巚偄傑偡丅偙偺働乕僽儖偺怓偼偦傟偧傟乽敀丄愒丄崟乿偲側偭偰偄傞偲巚偄傑偡丅RC僒乕儃偱偼丄敀偼PWM丄愒傪Vcc乮亄乯丄崟傪GND乮-乯偲偟偰巊偭偰偄傑偟偨丅庴怣婡傕偙傟偲摨偠偱丄敀傪TXD乮弌椡怣崋乯丄愒傪Vcc乮亄乯丄崟傪GND乮-乯偲偄偆峔惉偵側偭偰偄傑偡丅
丂憓偟娫堘偊傞偙偲偼柍偄偲巚偄傑偡偑丄乽庴怣婡偺働乕僗偑戝偒偄偐傜暘夝偟偰巊偆乿応崌偼丄憓偟娫堘偊傞壜擻惈偑偁傞偺偱廫暘婥傪偮偗偰偔偩偝偄丅憓偟娫堘偊偨偐傜偲尵偭偰夡傟傞偙偲偼側偄偲巚偄傑偡偑丄桘抐偼嬛暔偱偡丅
丂仴 庴怣婡偺怣崋偼丠
丂RS232C偼丄亄12V傪侽丄-12V傪侾偲偟偰捠怣傪峴偄傑偡丅偪傚偭偲曄傢偭偰傑偡偹丅壓恾偺怣崋偼丄僷僜僐儞偵愙懕偡傟偽捠怣偡傞帠偑壜擻偵尒偊傑偡丅
丂偟偐偟丄庴怣婡偐傜弌椡偝傟傞偺偼TTL儗儀儖偺怣崋偱偡丅TTL儗儀儖偲偼丄0V乣0.8V傪乽俴乮Low乯乿丄2V乣5V傪乽俫(High)乿偲寛傔傜傟偨寛傑傝偛偲傪偦偆屇傃傑偡丅梫偡傞偵俆V偲侽V偱丄侽偲侾傪昞尰偡傞傢偗偱偡偹丅
丂偙傟偱偼丄僷僜僐儞偲捠怣側傫偰偱偒側偄偺偱偼丠巚偄傑偡傛偹丒丒丒巹傕偦偆巚偄崬傫偱偄傑偟偨丅偲偙傠偑丄僷僜僐儞偺僔儕傾儖億乕僩偼偄偄壛尭偱丄TTL儗儀儖偱傕庴偗晅偗偰偔傟傑偡丅儗儀儖曄姺側傫偰柍梡側偺偱偡丅
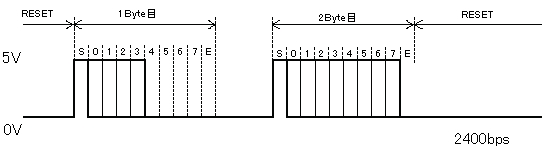
丂偝偰丄偙偙偱怣崋偵偮偄偰偺愢柧傪偟偰偍偒傑偡丅怣崋偼丄僗僞乕僩價僢僩偐傜巒傑傝丄僨乕僞偑俉價僢僩丄嵟屻偵僗僩僢僾價僢僩偑侾偮偺寁侾侽價僢僩偱峔惉偝傟偰偄傑偡丅
丂僗僞乕僩價僢僩偼忢偵侾傪弌椡偟丄偟傑偡丅怣崋偼忢偵侽偱偡偐傜丄侾偵曄傢偭偨帪偑怣崋偺奐巒偱偁傝丄僗僩僢僾價僢僩偑侽偐偳偆偐偱丄僨乕僞偑惓偟偄偺偐僄儔乕側偺偐傪敾掕偡傞偺偱偡丅僨乕僞偼撪梕偵墳偠偰曄壔偟傑偡丅
丂婎杮揑偵偼偙傫側姶偠偱偡丅怣崋偑彮側偄暘丄暘偐傝傗偡偄偱偡偹丅
丂RS232C偼丄亄12V傪侽丄-12V傪侾偲偟偰捠怣傪峴偄傑偡丅偪傚偭偲曄傢偭偰傑偡偹丅壓恾偺怣崋偼丄僷僜僐儞偵愙懕偡傟偽捠怣偡傞帠偑壜擻偵尒偊傑偡丅
丂偟偐偟丄庴怣婡偐傜弌椡偝傟傞偺偼TTL儗儀儖偺怣崋偱偡丅TTL儗儀儖偲偼丄0V乣0.8V傪乽俴乮Low乯乿丄2V乣5V傪乽俫(High)乿偲寛傔傜傟偨寛傑傝偛偲傪偦偆屇傃傑偡丅梫偡傞偵俆V偲侽V偱丄侽偲侾傪昞尰偡傞傢偗偱偡偹丅
丂偙傟偱偼丄僷僜僐儞偲捠怣側傫偰偱偒側偄偺偱偼丠巚偄傑偡傛偹丒丒丒巹傕偦偆巚偄崬傫偱偄傑偟偨丅偲偙傠偑丄僷僜僐儞偺僔儕傾儖億乕僩偼偄偄壛尭偱丄TTL儗儀儖偱傕庴偗晅偗偰偔傟傑偡丅儗儀儖曄姺側傫偰柍梡側偺偱偡丅
丂偝偰丄偙偙偱怣崋偵偮偄偰偺愢柧傪偟偰偍偒傑偡丅怣崋偼丄僗僞乕僩價僢僩偐傜巒傑傝丄僨乕僞偑俉價僢僩丄嵟屻偵僗僩僢僾價僢僩偑侾偮偺寁侾侽價僢僩偱峔惉偝傟偰偄傑偡丅
丂僗僞乕僩價僢僩偼忢偵侾傪弌椡偟丄偟傑偡丅怣崋偼忢偵侽偱偡偐傜丄侾偵曄傢偭偨帪偑怣崋偺奐巒偱偁傝丄僗僩僢僾價僢僩偑侽偐偳偆偐偱丄僨乕僞偑惓偟偄偺偐僄儔乕側偺偐傪敾掕偡傞偺偱偡丅僨乕僞偼撪梕偵墳偠偰曄壔偟傑偡丅
丂婎杮揑偵偼偙傫側姶偠偱偡丅怣崋偑彮側偄暘丄暘偐傝傗偡偄偱偡偹丅
丂仴 僷僜僐儞摨巑偱捠怣偟偰傒傛偆丅
丂傕偟傕丄偙傟傪撉傫偱傞婱曽偑僷僜僐儞傪擇戜偍帩偪偩偭偨傜丄捠怣偑壜擻偱偡丅偦偺慜偵庴怣婡懁偺D-SUB僐僱僋僞傪嶌傜側偄偲偄偗傑偣傫丅偙傟偑側偒傖丄捠怣偼晄壜擻偱偡丅僐僱僋僞偺攝慄偼丄僐僱僋僞偵婰嵹偝傟偰偄傞斣崋俀偲庴怣婡偺TXD丄俆斣偲庴怣婡偺GND丄俈斣偲8斣傪僔儑乕僩乮宷偖乯丅D-SUB僐僱僋僞偼丅偙傟偩偗偱OK偱偡丅
丂師偵丄俆V偑昁梫側偺偱丄揹尮傪梡堄偟偰偔偩偝偄丅D-SUB僐僱僋僞偵峴偔搑拞偱暘婒偝偣丄揹尮梡僐僱僋僞傊Vcc偲GND傪敿揷晅偗丅偙偺僐僱僋僞傪嶌傟偽捠怣弨旛姰椆偱偡丅
丂僴僀僷乕僞乕儈僫儖偺愝掕偼丄乽捠怣懍搙丗2400bps丄僨乕僞價僢僩丗8價僢僩丄僗僩僢僾價僢僩丗1丄僷儕僥傿丗柍偟丄僼儘乕惂屼丗柍偟乿偲愝掕偟傑偟傚偆丅偙傟偱暥帤傪懪偰偽丄暥帤偑暿偺僷僜僐儞偵昞帵偝傟傑偡丅
壓婰偺彜昳偼慡偰廐寧揹巕捠彜偵偰峸擖壜擻偱偡丅丂佀廐寧揹巕捠彜
仏2005擭2寧25擔尰嵼斕攧拞偺彜昳
丂傕偟傕丄偙傟傪撉傫偱傞婱曽偑僷僜僐儞傪擇戜偍帩偪偩偭偨傜丄捠怣偑壜擻偱偡丅偦偺慜偵庴怣婡懁偺D-SUB僐僱僋僞傪嶌傜側偄偲偄偗傑偣傫丅偙傟偑側偒傖丄捠怣偼晄壜擻偱偡丅僐僱僋僞偺攝慄偼丄僐僱僋僞偵婰嵹偝傟偰偄傞斣崋俀偲庴怣婡偺TXD丄俆斣偲庴怣婡偺GND丄俈斣偲8斣傪僔儑乕僩乮宷偖乯丅D-SUB僐僱僋僞偼丅偙傟偩偗偱OK偱偡丅
丂師偵丄俆V偑昁梫側偺偱丄揹尮傪梡堄偟偰偔偩偝偄丅D-SUB僐僱僋僞偵峴偔搑拞偱暘婒偝偣丄揹尮梡僐僱僋僞傊Vcc偲GND傪敿揷晅偗丅偙偺僐僱僋僞傪嶌傟偽捠怣弨旛姰椆偱偡丅
丂僴僀僷乕僞乕儈僫儖偺愝掕偼丄乽捠怣懍搙丗2400bps丄僨乕僞價僢僩丗8價僢僩丄僗僩僢僾價僢僩丗1丄僷儕僥傿丗柍偟丄僼儘乕惂屼丗柍偟乿偲愝掕偟傑偟傚偆丅偙傟偱暥帤傪懪偰偽丄暥帤偑暿偺僷僜僐儞偵昞帵偝傟傑偡丅
壓婰偺彜昳偼慡偰廐寧揹巕捠彜偵偰峸擖壜擻偱偡丅丂佀廐寧揹巕捠彜
仏2005擭2寧25擔尰嵼斕攧拞偺彜昳
| 彜昳柤 | 抣抜 | 屄悢 |
|---|---|---|
| D僒僽 僐僱僋僞梡僔僃儖丂9P | 50墌 | 1屄 |
| D僒僽 僐僱僋僞丂9P丒儊僗乮敿揷晅偗僞僀僾乯 | 50墌 | 1屄 |
| 挻彫宆僗僀僢僠儞僌AC傾僟僾僞丂5V 1A乮AC100乣AC240V摦嶌乯 | 600墌 | 1屄 |
| 昗弨DC僕儍僢僋乮僷僱儖庢傝晅偗宆乯 | 30墌 | 1屄 |
丂仴 儅僀僐儞懁偺僔儕傾儖捠怣
丂僷僜僐儞偺捠怣偼偱偒傑偟偨丅摨偠梫椞偱丄H8偺RXD偵庴怣婡偺怣崋慄傪宷偘偽摦偔傫偠傖側偄丠巹傕偦偆巚偄傑偟偨丅偟偐偟丄偣偭偐偔TTL側偺偩偐傜儗儀儖曄姺側偳峴傢偢丄捈愙儅僀僐儞偵宷偄偱偟傑偊偽椙偄偺偱偡丅岾偄丄AKI-H8/3052F偵偼
丂億乕僩俋偺俀斣栚乮P9-2亂RXD0亃乯偲俁斣栚乮P9-3亂RXD1亃乯偑TTL儗儀儖偱捠怣傪峴偊傞億乕僩偱偡丅偙偙偵宷偘偽摦偔偼偢側偺偱偡偑丒丒丒偙偺忬懺偱偼惓忢偵庴怣偱偒偒傑偣傫丅側偤側偺偐両丠
丂摎偊偼丄庴怣婡偑敪偡傞怣崋偵偁傝傑偡丅妋偐偵僷僜僐儞偱偼丄僗僞乕僩價僢僩偑侾偺帪偐傜巒傑傝丄僗僩僢僾價僢僩偑侽偱廔傢傞丄偁偺怣崋偱栤戣偁傝傑偣傫偱偟偨丅
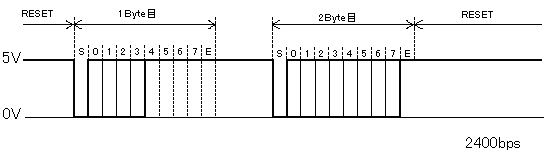
丂偲偙傠偑儅僀僐儞懁偱偼丄僗僞乕僩價僢僩偼侽偱巒傑傝丄僗僩僢僾價僢僩偑侾偺帪偵廔椆偟傑偡丅偮傑傝丄偁偺怣崋傪擖傟傞偲丄僗僩僢僾價僢僩偑侾偵側傞偙偲偼偁傝偊側偄傢偗偱偡丅椺偊塣椙偔僗僩僢僾價僢僩偑侾偵側偭偨偲偟偰傕丄僨乕僞偼摉慠丄傔偪傖偔偪傖偱偡丅
丂惓偟偄捠怣傪峴偆偵偼壓恾偺傛偆側怣崋偵偟側偗傟偽側傝傑偣傫丅偮傑傝P9偲庴怣婡偺娫偵怣崋傪斀揮偝偣傞暔偑偁傟偽椙偄栿偱偡丅乽斀揮乿偲偄偆暥帤傪尒偰丄巚偄晜偐偽傟偨曽傕偄傞偲巚偄傑偡丅偦偆偱偡丄儘僕僢僋IC偺74HC04乮傕偟偔偼74HC14乯偱偡丅偙偺IC偼丄揹埑傪斀揮偝偣傞偙偲偑偱偒傑偡丅嬶懱揑偵偼丄IC偵擖椡偝傟偨偺偑侽側傜偽侾偲弌椡丄侾偑擖椡偝傟傟偽侽偲弌椡偲偄偆嬶崌偱偡丅
丂偨偐偑堦屄偺慄偵14僺儞偺IC傪巊偄偨偔偼偁傝傑偣傫偑丄巆傝偼偆傑偄偙偲巊偭偰偁偘偰偔偩偝偄丅巹偼庤帩偪偵74HC14偟偐側偐偭偨偺偱丄偙偺IC偱斀揮傪峴偄傑偟偨丅偝偰丄偙傟傜偺IC偱斀揮偝偣偨怣崋偱傛偆傗偔捠怣壜擻偲側傝傑偡丅
丂嵟屻偵拲堄偟側偗傟偽側傜側偄偙偲偑堦偮偁傝傑偡丅偦傟偼2僶僀僩偺僨乕僞傪揮憲屻偼17msec偺儕僙僢僩偑昁梫偩偲偄偆偙偲丅偮傑傝丄偲偄偆偙偲偵側傝傑偡丅儅僀僐儞懁偱僾儘僌儔儉傪慻傓帪偼偙偺曈傝傕婥傪偮偗傑偟傚偆丅
丂僷僜僐儞偺捠怣偼偱偒傑偟偨丅摨偠梫椞偱丄H8偺RXD偵庴怣婡偺怣崋慄傪宷偘偽摦偔傫偠傖側偄丠巹傕偦偆巚偄傑偟偨丅偟偐偟丄偣偭偐偔TTL側偺偩偐傜儗儀儖曄姺側偳峴傢偢丄捈愙儅僀僐儞偵宷偄偱偟傑偊偽椙偄偺偱偡丅岾偄丄AKI-H8/3052F偵偼
丂億乕僩俋偺俀斣栚乮P9-2亂RXD0亃乯偲俁斣栚乮P9-3亂RXD1亃乯偑TTL儗儀儖偱捠怣傪峴偊傞億乕僩偱偡丅偙偙偵宷偘偽摦偔偼偢側偺偱偡偑丒丒丒偙偺忬懺偱偼惓忢偵庴怣偱偒偒傑偣傫丅側偤側偺偐両丠
丂摎偊偼丄庴怣婡偑敪偡傞怣崋偵偁傝傑偡丅妋偐偵僷僜僐儞偱偼丄僗僞乕僩價僢僩偑侾偺帪偐傜巒傑傝丄僗僩僢僾價僢僩偑侽偱廔傢傞丄偁偺怣崋偱栤戣偁傝傑偣傫偱偟偨丅
丂偲偙傠偑儅僀僐儞懁偱偼丄僗僞乕僩價僢僩偼侽偱巒傑傝丄僗僩僢僾價僢僩偑侾偺帪偵廔椆偟傑偡丅偮傑傝丄偁偺怣崋傪擖傟傞偲丄僗僩僢僾價僢僩偑侾偵側傞偙偲偼偁傝偊側偄傢偗偱偡丅椺偊塣椙偔僗僩僢僾價僢僩偑侾偵側偭偨偲偟偰傕丄僨乕僞偼摉慠丄傔偪傖偔偪傖偱偡丅
丂惓偟偄捠怣傪峴偆偵偼壓恾偺傛偆側怣崋偵偟側偗傟偽側傝傑偣傫丅偮傑傝P9偲庴怣婡偺娫偵怣崋傪斀揮偝偣傞暔偑偁傟偽椙偄栿偱偡丅乽斀揮乿偲偄偆暥帤傪尒偰丄巚偄晜偐偽傟偨曽傕偄傞偲巚偄傑偡丅偦偆偱偡丄儘僕僢僋IC偺74HC04乮傕偟偔偼74HC14乯偱偡丅偙偺IC偼丄揹埑傪斀揮偝偣傞偙偲偑偱偒傑偡丅嬶懱揑偵偼丄IC偵擖椡偝傟偨偺偑侽側傜偽侾偲弌椡丄侾偑擖椡偝傟傟偽侽偲弌椡偲偄偆嬶崌偱偡丅
丂偨偐偑堦屄偺慄偵14僺儞偺IC傪巊偄偨偔偼偁傝傑偣傫偑丄巆傝偼偆傑偄偙偲巊偭偰偁偘偰偔偩偝偄丅巹偼庤帩偪偵74HC14偟偐側偐偭偨偺偱丄偙偺IC偱斀揮傪峴偄傑偟偨丅偝偰丄偙傟傜偺IC偱斀揮偝偣偨怣崋偱傛偆傗偔捠怣壜擻偲側傝傑偡丅
丂嵟屻偵拲堄偟側偗傟偽側傜側偄偙偲偑堦偮偁傝傑偡丅偦傟偼2僶僀僩偺僨乕僞傪揮憲屻偼17msec偺儕僙僢僩偑昁梫偩偲偄偆偙偲丅偮傑傝丄偲偄偆偙偲偵側傝傑偡丅儅僀僐儞懁偱僾儘僌儔儉傪慻傓帪偼偙偺曈傝傕婥傪偮偗傑偟傚偆丅
丂仴 SCI偺弶婜壔偵偮偄偰偺拲堄
丂捠怣懍搙偑2400bps偲嬌抂偵抶偄偺偱丄SCI偺弶婜壔偵偮偄偰怗傟偰偍偒傑偡丅SCI傪椙偔抦傜側偄偲偮傑偯偒傑偡丅偦傟偼丄SCI0.SMR.BYTE乮SCI1.SMR.BYTE乯偺晹暘偱偡丅戝敿偺曽偑侽傪戙擖偟偰偄傞偲巚偄傑偡丅傑偨丄捠怣懍搙傪擖椡偡傞丄SCI0.BRR乮SCI1.BRR乯偼捠怣懍搙偑曄壔偡傞偨傃偵曄偊偰偄傞偐傜栤戣側偄偲偟傑偟傚偆丅
丂崱夞偼丄偙傟傜擇売強偵娭偡傞栤戣偱偡丅愭偵傕弎傋偨偲偍傝丄崱夞偺椺偼2400bps偲嬌抂偵抶偄偱丄晛抜偼愝掕偟側偄SMR偺曽偵彮乆廋惓傪壛偊傑偡丅 丂僴乕僪僂僃傾儅僯儏傾儖偺13僔儕傾儖僐儈儏僯働乕僔儑儞僀儞僞乕僼僃乕僗偺18儁乕僕栚丄昞13.3價僢僩儗乕僩偵懳偡傞BRR偺愝掕椺乮挷曕摨婜幃儌乕僪乯偵捠怣懍搙側偳偺愝掕椺偑嵹偭偰偄傑偡丅偦偺偟偰偔偩偝偄丅N偼BRR乮價僢僩儗乕僩儗僕僗僞乯偵戙擖偡傞抣丄n偼SMR乮僔儕傾儖儌乕僪儗僕僗僞乯偺CKS0,CKS1偵戙擖偡傞抣側偺偱偡丅
丂岾偄偵傕偙傟傜偼嵟壓埵價僢僩偵偁傞偺偱丄SCI0.SMR.BYTE乮SCI1.SMR.BYTE乯偵侾偲戙擖偡傟偽OK偱偡丅SCI0.SMR.BYTE乮SCI1.SMR.BYTE乯偵偼丄3052側傜偽80傪戙擖丅3048側傜偽丄207傪戙擖偟偰偔偩偝偄丅
丂偪側傒偵偙傟偼25MHz偺AKI-H8/3052F傪巊偭偰偄傞応崌偺傒昁梫側愝掕偱偡丅AKI-H8/3048F偼16MHz偲庒姳抶偄偨傔愝掕偡傞昁梫偼偁傝傑偣傫丅僴乕僪僂僃傾儅僯儏傾儖偺N偵婰弎偝傟偨悢抣傪BRR偵戙擖偡傟偽栤戣偁傝傑偣傫丅
丂捠怣懍搙偑2400bps偲嬌抂偵抶偄偺偱丄SCI偺弶婜壔偵偮偄偰怗傟偰偍偒傑偡丅SCI傪椙偔抦傜側偄偲偮傑偯偒傑偡丅偦傟偼丄SCI0.SMR.BYTE乮SCI1.SMR.BYTE乯偺晹暘偱偡丅戝敿偺曽偑侽傪戙擖偟偰偄傞偲巚偄傑偡丅傑偨丄捠怣懍搙傪擖椡偡傞丄SCI0.BRR乮SCI1.BRR乯偼捠怣懍搙偑曄壔偡傞偨傃偵曄偊偰偄傞偐傜栤戣側偄偲偟傑偟傚偆丅
丂崱夞偼丄偙傟傜擇売強偵娭偡傞栤戣偱偡丅愭偵傕弎傋偨偲偍傝丄崱夞偺椺偼2400bps偲嬌抂偵抶偄偱丄晛抜偼愝掕偟側偄SMR偺曽偵彮乆廋惓傪壛偊傑偡丅 丂僴乕僪僂僃傾儅僯儏傾儖偺13僔儕傾儖僐儈儏僯働乕僔儑儞僀儞僞乕僼僃乕僗偺18儁乕僕栚丄昞13.3價僢僩儗乕僩偵懳偡傞BRR偺愝掕椺乮挷曕摨婜幃儌乕僪乯偵捠怣懍搙側偳偺愝掕椺偑嵹偭偰偄傑偡丅偦偺偟偰偔偩偝偄丅N偼BRR乮價僢僩儗乕僩儗僕僗僞乯偵戙擖偡傞抣丄n偼SMR乮僔儕傾儖儌乕僪儗僕僗僞乯偺CKS0,CKS1偵戙擖偡傞抣側偺偱偡丅
丂岾偄偵傕偙傟傜偼嵟壓埵價僢僩偵偁傞偺偱丄SCI0.SMR.BYTE乮SCI1.SMR.BYTE乯偵侾偲戙擖偡傟偽OK偱偡丅SCI0.SMR.BYTE乮SCI1.SMR.BYTE乯偵偼丄3052側傜偽80傪戙擖丅3048側傜偽丄207傪戙擖偟偰偔偩偝偄丅
丂偪側傒偵偙傟偼25MHz偺AKI-H8/3052F傪巊偭偰偄傞応崌偺傒昁梫側愝掕偱偡丅AKI-H8/3048F偼16MHz偲庒姳抶偄偨傔愝掕偡傞昁梫偼偁傝傑偣傫丅僴乕僪僂僃傾儅僯儏傾儖偺N偵婰弎偝傟偨悢抣傪BRR偵戙擖偡傟偽栤戣偁傝傑偣傫丅
| 捠怣懍搙 | H8/3048F(16MHz) | H8/3052F(25MHz) | ||
|---|---|---|---|---|
| n | N | n | N | |
| 2400 | 0 | 207 | 1 | 80 |
| 9600 | 0 | 51 | 0 | 80 |
| 19200 | 0 | 25 | 0 | 40 |
| 38400 | 0 | 12 | 0 | 19 |
丂仴 偍傢傝偵
丂埲忋偱丄崱夞偼廔傢傝偱偡丅KHR-1搵嵹偺RCB-1偵宷偘偽偦傟偱偍廔偄偲偄偆偙偲傕偁傝丄僀儞僞乕僱僢僩忋偱偼慡偔忣曬偑偁傝傑偣傫偱偟偨丅嬤摗壢妛偝傫偺WEB儁乕僕偵偰岞奐偝傟偰偄傞儅僯儏傾儖丄RCB-1僐儅儞僪儕僼傽儗儞僗傗傪棅傝偵幚尡傪孞傝曉偟傑偟偨偑丄SCI傗TTL丄RS232C側偳暘偐偭偰偄側偄暔傕偨偔偝傫偁傝丄嶌嬈偼戝暘擄峲偟傑偟偨丅
丂側傫偲偐偙偙傑偱偙傜傟偰椙偐偭偨偱偡丅嵟屻偵丄偄傠偄傠偲僒億乕僩偟偰偔偩偝偭偨媑懞戉挿丄嬤摗壢妛偺僒乕價僗晹偺奆條偵丄偙偺応傪庁傝偰偍楃怽偟忋偘傑偡丅偳偆傕偁傝偑偲偆偛偞偄傑偟偨丅
丂埲忋偱丄崱夞偼廔傢傝偱偡丅KHR-1搵嵹偺RCB-1偵宷偘偽偦傟偱偍廔偄偲偄偆偙偲傕偁傝丄僀儞僞乕僱僢僩忋偱偼慡偔忣曬偑偁傝傑偣傫偱偟偨丅嬤摗壢妛偝傫偺WEB儁乕僕偵偰岞奐偝傟偰偄傞儅僯儏傾儖丄RCB-1僐儅儞僪儕僼傽儗儞僗傗傪棅傝偵幚尡傪孞傝曉偟傑偟偨偑丄SCI傗TTL丄RS232C側偳暘偐偭偰偄側偄暔傕偨偔偝傫偁傝丄嶌嬈偼戝暘擄峲偟傑偟偨丅
丂側傫偲偐偙偙傑偱偙傜傟偰椙偐偭偨偱偡丅嵟屻偵丄偄傠偄傠偲僒億乕僩偟偰偔偩偝偭偨媑懞戉挿丄嬤摗壢妛偺僒乕價僗晹偺奆條偵丄偙偺応傪庁傝偰偍楃怽偟忋偘傑偡丅偳偆傕偁傝偑偲偆偛偞偄傑偟偨丅
