|
仴丂慜彂偒丂仴 丂XMODEM傪巊偊傞傛偆偵側傞偲丄PC忋偵儅僀僐儞偺儌乕僔儑儞僨乕僞傗弶婜愝掕偺僨乕僞摍傪曐懚偱偒傞傛偆偵側傝傑偡丅僴僀僷乕僞乕儈僫儖傗丄TERATERM傪巊傢傟偰偄傞曽偼丄夋柺忋偐傜暥帤傪懪偪崬傫偱儌乕僔儑儞傪嶌偭偰偄傞偺偱偼側偄偱偟傚偆偐丠 丂EEPROM偑偁傞側傜偽曐懚偱偒傑偡偑丄側偄応崌偼枅夞僾儘僌儔儉拞偵僨乕僞傪曐懚偟偰丄僐儞僷僀儖偟偰從偒偙傫偱丒丒丒偲偄偆庤懕偒偑偁傝丄柺搢偱偡丅彮側偔偲傕丄巹偼偦偆姶偠傑偟偨丅 丂偦偙偱丄巹傕傛偆傗偔EEPROM傪埖偊傞傛偆偵側偭偨偺偱丄XMODEM傪巊偭偰僨乕僞偺媧弌偟偲丄揮憲傪峴偊傞傛偆偵偟傛偆偲WEB忋傪扵嶕偟丄巊偄曽傪抦傞帠偑偱偒傑偟偨丅崱夞偼丄XMODEM傪偳偺傛偆側庤懕偒傪峴偊偽丄儅僀僐儞偲捠怣偱偒傞偺偐傪徯夘偟傑偡丅
丂XMODEM偼僷僜僐儞捠怣傪峴偆偨傔偵巊傢傟偰偄偨捠怣曽朄偺堦偮丅旕忢偵娙扨側愝掕偱僶僀僫儕僨乕僞偺揮憲偑偱偒偨偺偱丄偨偔偝傫偺僐儞僺儏乕僞傗僜僼僩偱傕幚憰偝傟偰偄傞丅偟偐偟丄懡偔偺栤戣揰傕書偊偰偄傞傜偟偄丅 丂懠偵傕丄YMODEM傗ZMODEM摍傕偁傞偑丄偲傝偁偊偢昁梫側偝偦偆側偺偱丄XMODEM傪幚憰偡傞偙偲偵偟偨丅乮崱屻丄曄偊偨傎偆偑椙偝偦偆側傜偽丄傑偨挷傋傞偐傕偟傟傑偣傫丅乯 |
仴丂僽儘僢僋偺峔憿丂仴
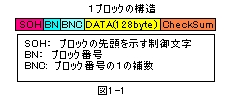
丂XMODEM偼丄僨乕僞傪乽僽儘僢僋偲屇偽傟傞扨埵乿偱憲怣偟傑偡丅偦偺僽儘僢僋偺峔憿傪恾1-1偵帵偟傑偡丅
SOH乮Start Of Heading偺棯乯偼惂屼暥帤偱丄ASCII僐乕僪偱尵偆偲0x01偵側傝傑偡丅偙傟傪丄庴怣偟偨傜乽偙偙偐傜1僽儘僢僋偑巒傑傞乿偲暘偐傞栿偱偡丅 BN乮Block Number偺棯乯偼丄僽儘僢僋斣崋偱偡丅乮偦偺傑傫傑偱偡偹乯嵟弶0x01偐傜巒傑傝丄0xFF偵側傞偲0x00偵儕僙僢僩偝傟偰丄傑偨僇僂儞僩偝傟偰偄偒傑偡丅 BNC偼丄僽儘僢僋斣崋偺侾偺曗悢偱偡丅憗偄榖偑丄僽儘僢僋斣崋傪斀揮偝偣偨悢帤偱偡丅0x01側傜0xFE丄0x15側傜0xEA偵側傝傑偡丅偙傟偼僄儔乕僠僃僢僋偵巊傢傟傑偡丅 DATA偺晹暘偱丄128僶僀僩偺僨乕僞傪憲怣偡傞偙偲偑偱偒傑偡丅txt偵彂偐傟偰偄傞128屄偺僉儍儔僋僞暥帤傪丄巒傔偺曽偐傜弴斣偵憲怣偟丄128屄暘憲傞傑偱巭傑傝傑偣傫丅傕偟傕丄100屄傑偱 |
偟偐僨乕僞偑側偔丄偦偺屻偑嬻偱偁偭偨応崌偼丄懌傝側偄暘傪乽Control-Z乮0x1A乯乿偱杽傔傑偡丅 CheckSum偼丄愭掱憲偭偨乕僞晹暘傪慡偰懌偟偰256偱妱偭偨悢偺梋傝偱偡丅偙傟傕僄儔乕僠僃僢僋梡偱偡丅 埲忋偱丄侾僽儘僢僋偺愢柧傪廔傢傝傑偡丅 仴丂捠怣偺庤弴丂仴
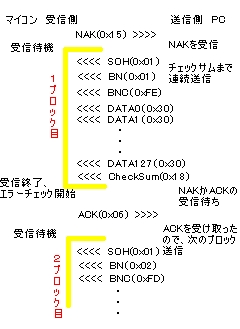
丂偦傟偱偼丄偄傛偄傛XMODEM偺揮憲庤弴傪愢柧偟偰偄偒傑偡丅僨乕僞揮憲偺庤弴傪埲壓偵帵偟傑偡丅
|
|
STEP1:丂庴怣懁偼NAK傪憲怣偟偰丄SOH偑憲傜傟偰偔傞偺傪懸偪傑偡丅堦掕帪娫懸偭偰傕SOH偑憲傜傟偰偙側偄応崌偼丄嵞搙NAK傪憲傝傑偡丅
STEP2:丂憲怣懁偼NAK傪庴偗庢偭偨傜丄SOH偐傜僠僃僢僋僒儉傑偱偺僨乕僞傪楢懕偱憲怣偟傑偡丅庴怣懁偼丄傂偨偡傜庴怣偟懕偗傑偡丅 STEP3:丂憲怣懁偼丄僠僃僢僋僒儉傑偱憲傝廔傢偭偨傜丄僄儔乕僠僃僢僋偺寢壥偑憲怣偝傟偰偔傞偺傪懸偪傑偡丅 丂庴怣懁偼僄儔乕僠僃僢僋傪奐巒偟傑偡丅傑偢丄BN偲BNC傪懌偟崌傢偣丄崌寁偑0xFF偵側傟偽僄儔乕偼偁傝傑偣傫丅 丂師偵僠僃僢僋僒儉偺僄儔乕僠僃僢僋偵擖傝傑偡丅慜偵丄慡偰偺僨乕僞傪懌偟偰256偱妱偭偨梋傝偩偲尵偄傑偟偨偑丄幚嵺偼char偺儗僕僗僞偵懌偟偰偄偔偩偗偱OK偱偡丅 丂偮傑傝丄侽傪ASCII僐乕僪偵曄姺偡傟偽乽0x30乿偵側傝傑偡丅偙傟傪懌偟偰偄偔偲丄255偱僆乕僶乕僼儘乕偟偰丄傑偨侽偐傜僗僞乕僩偟傑偡丅 丂偙傟傪128夞傗偭偨寢壥偑丄僠僃僢僋僒儉偲摨偠側傜丄僄儔乕偼婲偙偭偰偄側偄偙偲偵側傝傑偡丅 丂僾儘僌儔儉偵偡傞偲埲壓偺傛偆側姶偠偵側傝傑偡丅 unsigned char x = 0; char i, data[128]; /* data偼丄庴怣偟偨僨乕僞*/ for(i=0;i<128;i++) x = x + data[i]; |
丂傕偟丄僨乕僞偵0xFF側偳偺偍偐偟偄僨乕僞偑崿偞偭偰偄傟偽丄僠僃僢僋僒儉偼摨偠偵側傜側偄偺偱僄儔乕偩偲暘偐傝傑偡丅
STEP4:丂傕偟傕OK側傜偽ACK傪憲怣偟丄師偺僽儘僢僋偑憲怣偝傟偰偔傞偺傪懸偪傑偡丅僄儔乕偑偁傟偽NAK傪憲怣偟丄崱憲傜傟偰偒偨撪梕傪傕偆堦搙憲傞傛偆偵偟傑偡丅 STEP5:丂傕偟傕丄師偺僽儘僢僋偑側偔廔椆偱偁傞応崌偼丄ACK傪憲怣懁偑庴偗庢傞偲丄EOT傪憲怣偟傑偡丅庴怣懁偼EOT傪庴偗庢偭偨傜丄ACK傪傕偆堦搙憲怣偟丄捠怣傪廔椆偟傑偡丅 丂嵟屻偵丄惂屼暥帤傪昞偵傑偲傔偰偍偒傑偡丅
丂埲忋偱捠怣曽朄偺愢柧傪廔傢傝傑偡丅 仴丂TERATERM丂PRO丂仴 丂崱夞丄僄儔乕僠僃僢僋曽幃偼CheckSum傪梡偄偨曽朄偱偟偨丅偙偺懠偵傕CRC偲偄偆僄儔乕僠僃僢僋曽幃偑偁傝傑偡丅 |
丂僷僜僐儞偵弶婜偐傜僀儞僗僩乕儖偝傟偰偄傞僴僀僷乕僞乕儈僫儖偩偲丄僄儔乕僠僃僢僋偑僨僼僅儖僩偱CRC曽幃偵側偭偰偄傞偺偱丄偪傖傫偲捠怣偱偒傑偣傫丅
丂TERATERM丂PRO側傜偽丄僄儔乕僠僃僢僋偺曽朄傪慖傇帠偑偱偒傞偺偱丄崱夞偺CheckSum傪梡偄偨曽朄偱捠怣偡傞偙偲偑偱偒傑偡丅 丂偟偐偟丄栤戣偑堦偮偁傝傑偡丅偦傟偼憲怣奐巒傪梫媮偡傞乽NAK乿偺憲怣偱偡丅捠怣偺愢柧偺強偱丄SOH偑憲傜傟偰偙側偐偭偨傜乽NAK傪嵞搙憲怣偡傞丅乿偲偁偭偨偲巚偄傑偡丅 丂偙偺嵞搙憲怣偡傞帪娫偑憗偡偓傞偲丄TERATERM丂PRO偱偼惓忢偵摦嶌偣偢丄偢偭偲僄儔乕偑弌偰偟傑偄傑偡丅NAK傪嵞憲怣偡傞帪娫偼5昩埲忋偁傞偲丄惉岟偟傑偡 丂5昩偼寢峔挿傔偵庢偭偰偄傞偺偱丄壗搙偐挷惍偝傟偨傜傕偆傕偆彮偟憗偔偰傕戝忎晇偩偲巚偄傑偡丅 仴丂拲堄揰丂仴 丂傕偟傕丄txt偵偁傞暥帤偑128暥帤偱妱傝愗傟側偄応崌偼丄巆傝偺嬻偺晹暘偑Control-Z丄懄偪惂屼暥帤偱尵偆強偺SUB乮0x1A乯偱杽傔傜傟偰偟傑偆偺偱丄拲堄偟偰偔偩偝偄丅 丂椺偊偽丄嵟屻偺2暥帤偑懌傝側偄応崌偼丄0x1A 0x1A偲憲怣偝傟傑偡丅儅僀僐儞懁偱偙傟傜傪張棟偟偰偍偐側偄偲丄屻乆栵夘側帠偵側傞帠偑峫偊傜傟傞偺偱拲堄偟傑偟傚偆丅 |
|||||||||||||||||||||||||||||||||
|
仴丂嵟屻偵...丂仴 丂崱夞偼XMODEM偵偮偄偰挷傋偨帠傪傑偲傔偰傒偨偩偗側偺偱丄暘偐傝擄偄晹暘偑懡乆偁傞偲巚偄傑偡丅傕偟傕暘偐傜側偄晹暘丄娫堘偭偰偄傞丄摍偑偁傝傑偟偨傜宖帵斅偵偰怽偟弌偰偔偩偝偄丅 丂巹傕姰帏偵棟夝偟偰偄傞丒丒丒偲偼尵偊側偄偺偱丄彮偟偢偮暘偐傝傗偡偄暥復偵偟偰偄偗傞傛偆偵婃挘傝傑偡丅
|
嶲峫暥專仌嶲峫URL
Google偵偰専嶕 専嶕儚乕僪丂侾偺曗悢 丒乽徫婄傪偁側偨偵傕丄斶偟傒傪傢偨偟偵傕乿丂佀丂IP 偺僠僃僢僋僒儉 -- 1偺曗悢墘嶼 専嶕儚乕僪丂XMODEM 僨乕僞僽儘僢僋 ACK 丒儌乕僶僀儖僐儞僺儏乕僥傿儞僌偵偍偗傞 僄乕僕僃儞僩偺奐敪 丂佀丂戞係復 僾儘僩僞僀僾偺愝寁 丒Phinloda is here.丂佀丂Part俀 捠怣僾儘僩僐儖偺巇條 専嶕儚乕僪丂Control Z 16恑悢 丒HP丂僥僋僯僇儖 僪僉儏儊儞僩丂佀丂ascii |
|
