- 棒の長さ:L = 100[mm]
- おもりの重さ:mg = 54.5[gf]
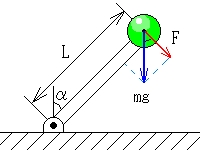
- おもりに働く力:F = mg[gf]×cos(90-α)
- 足首に働くモーメント:M = F[kgf]×L[cm]
- 角度:α = 数値は任意(0°~90°)
足首にかかるモーメントを考える事で、足首に必要なトルクが分かります。
54.5gのおもりをつけた100mmの棒を、地面で固定する。棒がα傾いた時のモーメントMを求めよ。
ただし、棒は0°~90°まで動けるものとする。
|
|
|
この式に値を代入すると、以下のようになります。
M = 0.0545[kgf]×cos(90-α)×10[cm]
M = 0.545[kgf・cm]×cos(90-α)
| 先ほどできた計算式に0°~90°までの角度を代入して作ったグラフを下記に掲載しておきます。 おまけで、360度まで回した時のグラフも掲載しています。 | 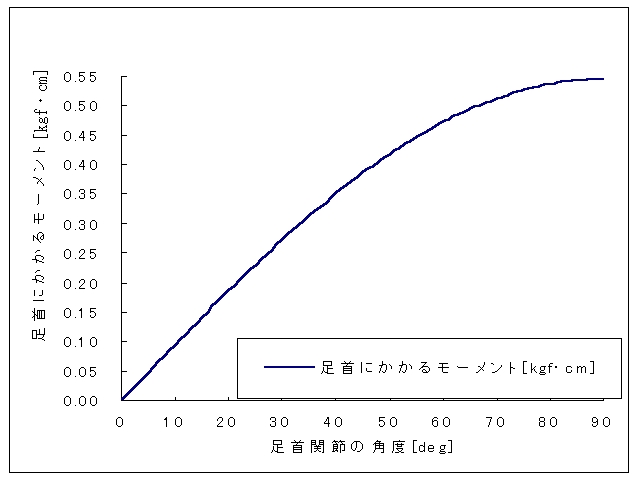 |
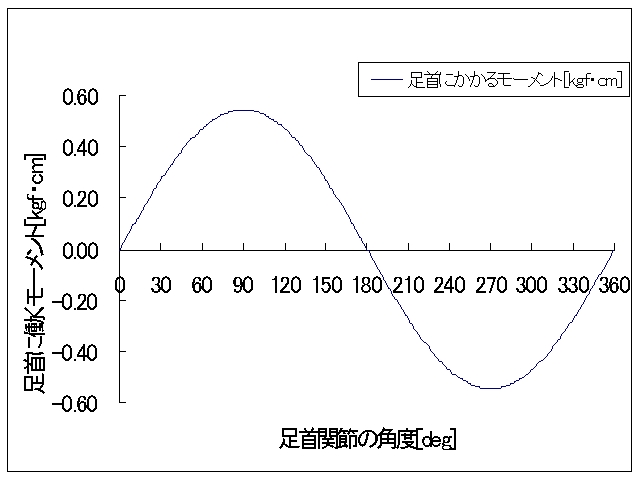 |
| 足首にかかるモーメント(0°~90°) | 足首にかかるモーメント(0°~360°) |
|---|---|
このグラフから、推察できるのは下記の通りです。
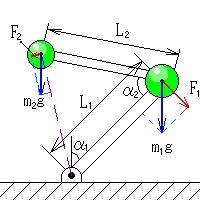
今度は、一本の棒ではなく、二本の棒で構成されていると考えて計算します。
54.5gのおもりをつけた100mmの棒L1と、109gのおもりをつけた100mmの棒L2があり、
L1の根元は地面に固定してある。棒がα1とα2傾いた時のモーメントMを求めよ。
ただし、棒はα1が0°~90°、α2が0°~180°まで動けるものとする。
|
|
F1については前回の計算で求められているので、F2について考えます。
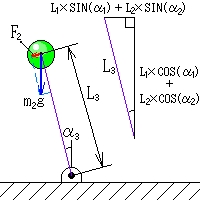
F2を求めるには、固定点からおもりmg2までの距離L3を求める必要があります。
なぜL3なのかというと、この二本の棒は「計算する時に角度が変化しない」という前提があるからです。
つまり、時が止まっている時に、力がどう働いているか調べてしまおうというわけです。
二本の棒が固定している(動かない、可動しない)ということは、もう一本棒を加えて三角形にしてしまっても問題ないのです。
そういう訳で、想像上の棒L3の長さがどのくらいなのか計算します。
最初に上の図のような直角三角形を作り、その底辺Aと高さBを求めます。
A[mm] = L1 × cos(α1) + L2 × cos(α2)
B[mm] = L1 × sin(α1) + L2 × sin(-α2)
ここで、三平方の定理を使います。
三平方の定理:C2 = A2 + B2
変形すると :C = √(A2 + B2)
式を代入すると:L3 = √{(L1×cos(α1)+L2×cos(α2))2 + ( L1×sin(α1)+L2×sin(-α2))2}
これでL3の式ができました。次に角度α3を求めます。
α3 = acos(A/L3)
式ができあがったので、数値を入れていきます。
これでモーメントM2が出たので、後はモーメントM1を足すだけです。
M = M1 + M2
式が複雑になってしまいましたが、これらの式に数値を入れれば足首に働くモーメントの答えが出てきます。
| 前回と同じく、先ほどできた計算式に0°~90°までの角度を代入して作ったグラフを下記に掲載しておきます。 おまけで、360度まで回した時のグラフも掲載しています。 | 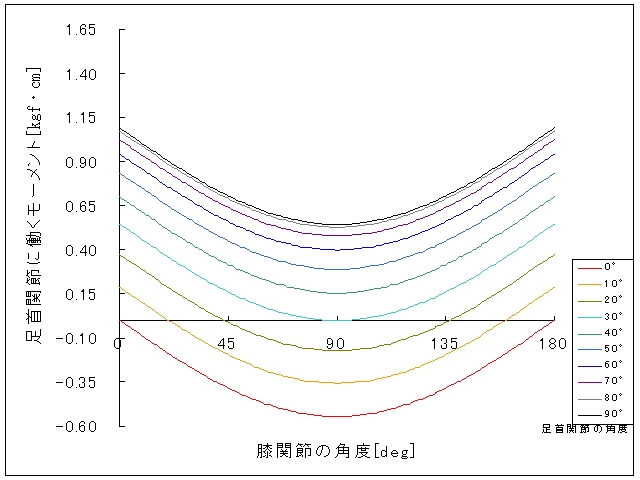 |
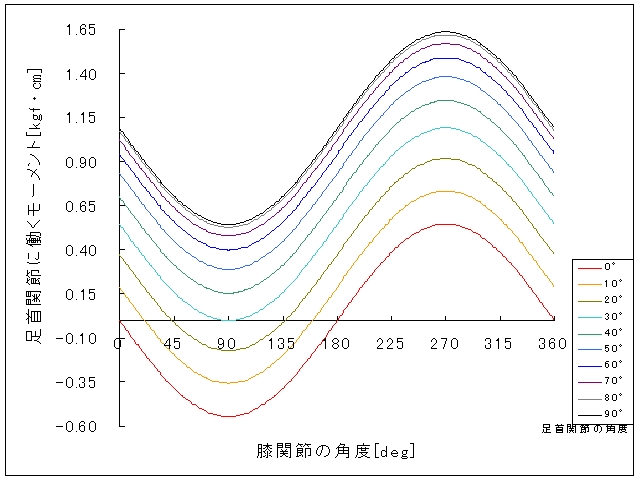 |
| 足首にかかるモーメント(0°~90°) | 足首にかかるモーメント(0°~360°) |
|---|---|
補足:このグラフは足首の角度を10度ずつ増やし、膝の角度を1度ずつ動かした時のグラフです。
| SEO | [PR] 爆速!無料ブログ 無料ホームページ開設 無料ライブ放送 | ||
