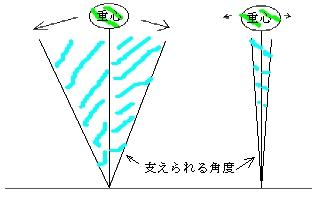
↑<支えられる角度に余裕があると倒れにくい。>
せようとすると、内側に倒れるのに一度足
を持ち上げてから、地面に下ろすと、今度
は外側に倒れたりするのです。当然、逆も
また然りです。
何度修正しても、結局維持できる角度は
ありませんでした。動作速度も現状で最も
遅い状態でやっていたので、速度を上げら
れても、速度をこれ以上遅くするのは不可
能でした。
第三回ROBO-ONEまでには、確実に歩行を実現させたいため、問題点を考えていきます。
二足歩行ロボットWegweiserの状況を掲載します。[2002/10/13(日)現在]
ROBO-ONE出場に最低限必要な動作を掲載[2002/10/13(日)現在]
上記からも、歩行の重要さが分かります。
二足歩行ロボットWegweiserに予想される、歩行妨害の様々な原因を掲載していきます。[2002/10/13(日)現在]
二足歩行ロボットWegweiserに予想される、歩行妨害の様々な原因を掲載していきます。[2002/10/13(日)現在]
今回動作させたWegweiserは片立ち時の状態を維持することができませんでした。
試行錯誤の結果、以下のような仮説を立てました。
↑<支えられる角度に余裕があると倒れにくい。> |
「1」の場合は、動作時に片足立ちをさ せようとすると、内側に倒れるのに一度足 を持ち上げてから、地面に下ろすと、今度 は外側に倒れたりするのです。当然、逆も また然りです。
何度修正しても、結局維持できる角度は |
また、上半身を搭載した時に、直立すら困難な状態になりました。前後、どちらかに
倒れてしまうのです。この時も足首がしっかりと体を支える事ができなかったのです。
この事からも、足首が体を支えられる角度が極端に少ないのだと思います。「上半身を
搭載するならば、トルクを上げるしかないのではないか?」と自分は考えます。
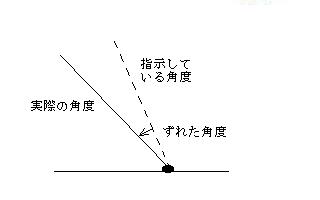 |
「2」の場合は、持ち上げた状態(無負荷 状態)では、指示通りの状態を維持している のですが、地面に下ろした状態(負荷状態) だと、指定した角度ではなくなってしまうの です。 |
以上のような理由を解決するには、単純にRCサーボから出力されるトルクを増幅する
しかないと考えました。
そこで、トルクUPの方法を5種類ほど考えて見ました。
上の中のバネ、チェーン、歯付きベルトは近日中に設計を行い、準備が整い次第実験
をして、どれが使えるか試すつもりです。
| SEO | [PR] 爆速!無料ブログ 無料ホームページ開設 無料ライブ放送 | ||
