昼に会うことになった。
いしかわさんが、頭の装着に必要な寸法を測りたいとのことで、日曜の12時頃に会うことになった。その間にこちらもモーションの一つや二つ披露したいところ。
その前に、腕の配線を〜・・・終わらせなきゃ〜・・・いけない。
テンション低いなぁ・・・。まずは、緩々なネジを締めなおしたり、ネジの本数が足りないところを増やしたりする。で、その作業を繰り返しているうちにあることに気づく。
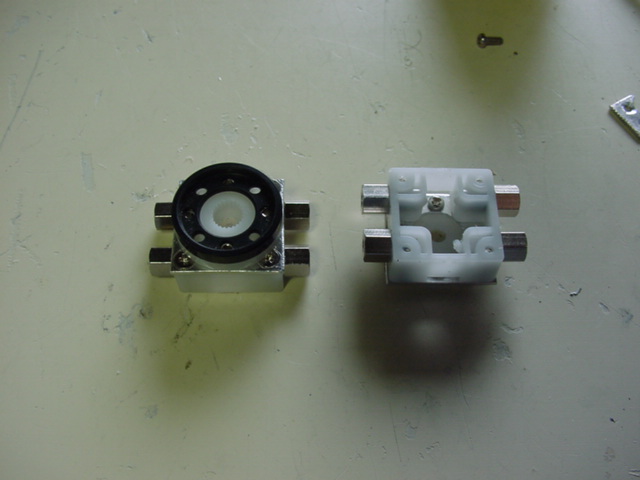
肩のブラケットが金属疲労でやばいことに

写真の右の方を見て頂けるだろうか?お亡くなり寸前のブラケットの様子が分かると思います。このままじゃ使いものにならなくなるのは明白。恐らく、加工時にホールソウで穴を空けた後に折りまげを行ったと思われる。
良くもまぁ、今までもったものである。
この時期に加工とは・・・

しゃーないので、作り直し決定。穴の位置も1mmほどずらして折り曲げの時に変な場所が曲がらないようにする。4隅を固定するのになぜか存在していたフランジはいらんので削除。
ケースの裏側に直接取り付けるので、フランジなんかいらない。なんでこんなもん付けたんだ?設計担当さん?
モーションまでいかねぇ〜
腕の再配線などが終わったのは23時頃。今日中に無理やん!眠たくもなってきたので、気分直しにモーションを作ってみる。
信号線を繋いでないので、上半身を固定できません!
構わん!作れぇっ!
で、歩行を作ってみるがどうもモーションの様子がおかしい。というより、マイコンの調子がおかしい。結局、モーションの作成も無理か・・・。(T▽T)
あなたは何やってんです!そんなところでっ!
さて、再び
思い立ったが吉日の話題に戻ろう。昨日から通信途絶状態。
今いしかわさんは睡眠を取ってなくて非常に危険だ。
で、日記によると・・・?
昨日から気付けは寝るのを忘れて半田づけ。
「この回路をWegweiserに取り付けるんだ〜。」テム
こんな古い物を・・・いしかわさん・・・酸素欠乏症にかかって。by アム○
いやいや、40時間稼働中って大会参加者と同じような状態じゃないですかっ!
で、タイトル通り・・・。
あなたは何やってんです!そんなところでっ!by カミ○ユ
不健康生活に万歳っ!
よくないパターンだが、日付を超えても作業を続行する。
森永さんの日記更新スピードを励みに、がんばることにした。とは言うものの、自分はあそこまで集中できない。できる範囲でがんばる。
で、引き続きバグの調査。モーション再生途中で信号が止まるというバグだ。大体検討はついているのだが・・・どこで失敗しているのかな。
H8/3052FのDMA転送限界時間
この種のバグは、今まで何度か経験した。それは、パルスとパルスの感覚が20/25000KHz = 0.8μsec未満になっていることだ。このパルス間に4とか14などの数値が入るとDMACの処理速度を上回ってしまい、結果DMACが途中で止まってしまうのではないかと考えている。
DMAは、使い方(I/Oモードだけではあるが)は分かるが、細かい事は分からないのでこんな推測になるのだが・・・。さて、話を戻そう。
では、どこが問題であったのか。以前の日記に補間用パルス生成後の数値を強引に20に変えていると言ったと思う。確かにこれは問題なかった。しかし、この処理の先にある指定したパルスをDMA転送用に加工する関数で、致命的な欠陥があったのを発見した。
それは、現在の角度にトリムの角度を加えると言う行為。トリムの角度に222をかけるという計算をおこなっているので、一方は無理やり20ごとに増えていくようになっているのに片方を222かけて足していれば、パルスとパルスの間が最悪2という数値になっても不思議ではない。
原因はここで、ここを強引に20ずつ増えるようにすることで解決しました。まぁ、0.1°以下の補間とか行わなければこういう問題は起こらなかったんですけどね・・・。
長すぎ・・・読む気が失せる。
モーション作ってみた

横歩き
再生時間:7秒 [666KB]
バグも直って再生ができるようになったので、モーションを作り始める。まずは基本の足踏み。重心を意識して作ってみる。Wegweiserは元々重たいものが上半身辺りに集中しているので、動歩行には向いている・・・はず。要は振り子が反対の方へ倒れる力を利用して重心を移動すれば良いのだ。
振り子をイメージしつつ、倒れないくらいの範囲に傾けて足踏みを試みた。その結果、以下のような感じになる。
最初重心を移動する足とは逆の足を若干伸ばし(300msec)
急いで足を上げ(100msec)
重心をちょっと移動しつつ足をおろす(100msec)
反対側の足をあげる(100msec)
反対側の足をおろす(100msec)
驚いたのが重心移動の量。今までは静歩行を目指していたので、横方向の重心移動は多く取る必要があり、各モーションでその姿勢を維持できるように作ってきた。
しかし、今回は動歩行を目指しているので各モーションのバランスは無視してモーション製作に当たっているためか、横方向の移動は、角度で言うと、足首と股関節のロール軸が2°程度。要らないんじゃないかと思うくらいしか重心移動をしていない。
久々にモーションを作ったのでちょっと感動した。「動歩行」と「走る」は別物ですからねぇ・・・。走れるかなぁ・・・。
おっと、横歩きの話でしたな。で、足踏みをしているとロボットから見て右方向に動いていったので、横歩きを作ることにした。この状態でも一応足は浮いてます。個人的にはNGかなぁ・・・ダメそうなら作り直すとして、今は最大の難関である歩行を攻略しないと。

歩行(二歩)
再生時間:5秒 [473KB]
横歩きで、結構な文章を書いてしまった。簡潔に行こう。基本的に足踏みと
隊長(四川の会 会長)のページにある歩行の切り替えを追加しただけです。たった二歩なので、調整をあんまりしなくても歩くのよね・・・。
三歩目を今作っているんですが三歩にした途端、前方へ豪快にダイブしてました。調整の必要大有りです。モーション作り初めて、意外と楽に歩けたので良かった。
ちなみに、この時点で朝の6時。仮眠を3時間〜4時間半くらい取って、秋葉原に出かけることにする。
ロボット王国にて・・・
いしかわさんが到着し、例の頭を取り付けてみる。さて・・・どんな感じかというと・・・!?
君は・・・生き残ることができるか!?
印象としては、上記のような感じ・・・。殺傷力高すぎ・・・。
某演説より抜粋
見よ!これが我々の戦果だ!
この頭は、Wegweiserへの嫌がらせを目的として開発されたものである!
南極条約違反のこの頭が、密かに開発された事実をもってしても、呪わしき石川さんの悪意を否定できる者がおろうか!
まぁ、どのロボットにも合うみたいだから、もしかしたら読者の皆さんにも装備されたりして・・・。来週の大会までに完成させるという。頭作らないと、この頭が装備されるのは必死。やばいなぁ・・・早く作らんと。
しかし、最近いしかわさんの所からのお客が多い。3月分の合計で、ロボワンアンテナに次ぐ第二位に浮上。こちらからのリンクは貢献できているのか、ちと不安。
アールティーへ行ってみた
目的は、右足首のモーター用配線を半田付けするためという、とんでもない理由だったり・・・。ついでに中川さんにも見てもらうという目的もあり。当然、モーションだけでなく、あの頭を・・・ふふふ。
しかし、ロボット教室を開いているとのことで、事務室にはいなかった。その間に半田付けして動作確認。自宅の作業場は傾いていると思っていたが、意外とすんなり動いてくれた。
これで、自宅の環境でも問題なくモーションを作ることができそうだ。で、中川さんが戻ってきたので見せようとしたが、左膝の初段ギアが欠ける。
初段はプラギアなので、予備は大量にあるので問題ない。交換することで正常に動作するようになるも、今度は左足首が動かない。たぶん、モーターの配線が切れかかっていると思われる。
相変わらず本番に弱い。まぁ、弱点がだんだん分かってきたので、翌日はこのモーターを中心に強化することとする。
で、
アールティで
ミステリーバーゲンなるものをやっているそうな。名前からして怪しいのであるが、中身はセールス品とのことでした。
また、エリア88のマッコイ爺さんのごとくクレムリン宮殿以外ならなんでも調達・・・っと言うわけにはいかないが、取り寄せ依頼をしてくれれば、なんでも入手してきてくれるとのこと。
個人では入手しにくい、センサーとかも入手しやすくなるはず。自分もなんかあったら利用してみようと思うが、今のところもてあましているのが多いので、しばらくはないかな・・・。
ちなみに、shop at rt-net.jp(atに@)へメールを送ってくださいとのこと。
逆アクセスランキング
今までは各TOPページのサムネイル画像を表示してくれていたが、ランクから消えるといちいち登録しなおさなければならず、面倒なので文字と何人出入りがあったか表示するタイプにした。
逆アクセスランキングを利用してくれる方がいるみたいで、なんか嬉しい。今後も利用者が増えてくれることを祈りつつ、設置の続行を決定。
ONOイチ
隊長の所で知った
ONOの電脳壁新聞のトップに載るというONOイチに別館にある動画館選ばれたようです。まさか、ONOイチになるとは夢にも思わなかった。ONOさんありがとうございます。m(_ _)m
三日分の日記って・・・
かなりハード。特に今日の日記が長いのなんのって・・・(T▽T)。動画館も更新して3時間も使ってしまった。しゃーないので、今日は早めに寝て明日に備えることとする。
溜め込むのはよろしくない・・・。
サーボマウントBを買い損ねた


昨日、サーボマウントBを買い忘れたのに気づき、ロボット王国に向かうが日曜日は19:30に閉店になるとの事で、門前払いになった。時計を見ると19:50分。ダメであった。
買いに行くのも時間の無駄。なければ作るしかない。どこに使うのかと言うと、肩のピッチ軸。アルミで作ったジョイントがボロボロなので、サーボマウントBと5mmのオスメスを使おうと思ったのだが・・・。
そんな訳で、アルミ板二枚(20x20xt1.0)を切り出し穴あけ。ポンチ打ち作業はまだ楽しくならない。修行が足りん。配線の圧着作業は楽しいと感じられるようになったので、進みますよー。
完成図は、この通り。これ自体が重いのだが、今回は軽量化ではなく剛性の向上なのだから問題ないし誤差の範囲である。
モータ端子強化
モーターの配線が外れることがあったので、足周りのモーターに片面ガラエポ基板を小さく切り、半田付け。この上に配線を半田付けすることで完成。意外と丈夫。まぁ、モーターの端子が折れたら泣くに泣けないしね。
前に一回折ったことがあるだけに、慎重に行きたいものである。ちなみに画像は足首の部分。昨日、ロボット王国に行ったときにココが外れていたせいであるけんかった。
バーニングの再来です。


バーニングと言っても、宮田のお兄さんのことじゃぁありませんよ。足首のRCサーボ制御基板が破損。原因不明(最悪)。気が付いたら、足首が片方しか保持してくれない現象が起こったので、まさかとは思っていたがFETがお亡くなりに。
幸い、制御基板のあまりがあったのでなんとかなったが、かなーり不安になりますな。どこかでFETを購入しておきたいところ・・・。
今度は燃えないでくれよぉー
立つ

ようやく、完全体で起動。全て動く状態。ちと時間がかかりすぎだが・・・。ここからモーションの作成が始まる・・・と思われたが、それについては次の項を読んで頂きたい。
さて、ここで残りの作業について書いておこう。まぁ、色々とある訳だがどこまでいけるのか。
残り作業リスト
- 参加資格審査
- マイコン用バッテリとの接続配線
- 頭
- 無線
- 無線装置
- ジャイロ
まぁ、こんなところか。頭はt0.5のアルミがメインなので夜中でも作業が可能。無線は、新しく発売されたコントローラを使おうか悩み。ジャイロは、間に合えば・・・と言ったところか。
無線やジャイロは、予選通過した場合の心配である。現状は、上記3つの完成だ。ここまで来て、棄権はとてもじゃないが受け入れられない。やる気を出す。いや、出せ!
シグナル受け付けませんっ!暴走?
起き上がりの動作作成を行っていて、モーションの再生を行うと左腕が暴走する。ココまで来て・・・腕を使おうとしたらこれか!これ以上やると壊れるので、デバッグ作業に入る。
LEDでパルスを確認する実験基板でチェック。なるほど、パルスがおかしいのが一目で分かる。さて、これがどこのバグなのかが問題。計算結果か、パルス生成関数か。
ひとまず、計算結果やEEPROM周りを見てみるとする。
バグの原因が分からない
日付を越しても戦闘は続く。左腕だけが暴走するというのならば、計算やEEPROMからのロードがおかしいからではないかと考え調査するが、どれも原因ではないらしい。そうこうしているうちに時間だけが過ぎていく。
しかし、その中でも得るものはあった。それは、RCサーボの振動だ。屈伸のときにどうもぎこちない動きをしていたのでおかしいとは思っていた。そこで、本来パルスの出力後(割り込みから10msec後)にパルス生成関数などでモーション用の角度を計算するのだが、どうも間に合っていなかったらしい。
パルスの転送中に、パルス生成関数で計算させるという方式にしたので、十分な時間を確保できた。で、屈伸をやってみたが、なかなかスムーズだ。今回の収穫はこれだけかな。
それ以外といえば、、EEPROMの保存時にRCSエディタから現在の角度をすべてマイコンへ転送するのだが、パルスの処理などが邪魔しないように転送中はパルスの出力を切る機能をつけたりした。
結局、原因不明で限界に来てたので、6時に就寝することにした。寝る間もどうしてなのか考えていたが、いつの間にか眠っていた。
目覚まし時計が・・・
うかつだった、目覚まし時計をセットするのを忘れたので、起きたのが12時を回っていた。まぁ、結果6時間睡眠なので普通の睡眠時間は確保できた。あとはこの睡眠が無駄にならないように頭をフル回転させる。
で、やることはバグ取りな訳ですが・・・。結局あーだこーだやって、計算でないことが証明され始めてくる。ふむ、やはりここは中枢のパルス生成関数を疑うしかないか。ここで、エディタであることに気づく。ある条件になるとパルスがおかしくなるのだ。
調べた結果、8ビットの角度が全て違う値だとパルス出力に異常をきたすようだ。となると、やはりパルス生成関数しか考えられないので、この条件で各値を表示させていく。
その結果、8個しかない配列の8番目(本来なら0〜7番目までしか指定してはいけない)の配列に0を代入している行が発見される。普通ならエラーなり警告がでると思い込んでいたので、見落としていた。しかも、その配列の番号を指定しているのは変数ときているのだから、警告がでないのも当たり前。
int型の配列であり、その次に宣言しているのがchar型の配列だったので、8番目のint型配列に0を入れるとメモリ上ではchar型の配列の0番目と1番目に0を入れるのと等価となる訳である。
コイツを削除したおかげで、全て問題なく動く。かなりほっとしたが、すぐモーション作成という気分になれない。なんだ・・・この感覚は?という不思議な状態。
そんな気持ちを晴らすべく、昨日の日記を書いておりました。このときの時間は、18時。時間がかかりすぎた。
歩行モーション

歩行(四歩)
再生時間:5秒 [474KB]
ダメ元で、前に作った歩行モーションを再生してみる。なんと、問題なく動いた。若干諦めモードだっただけにありがたい!で、その直後のモーションがこちら。
アールティで作ったヤツですが、デジカメがなかったので撮影できず。再配線後に動かそうとしたら暴走したため、しばらく公開できませんでした。
100msecの周期(最初の重心移動は300msec)で動作させているためか、前のめりになりますね。これは全てその場その場で調整したものなので、全体で見ると全て値がバラバラ。

歩行(四歩)
再生時間:5秒 [473KB]
で、こちらが最適化を行った歩行モーション。周期は若干下げて各120msecでやっとります。安定した歩行になりました。2350の性能がいいせいか剛性が上がったせいか、左右でほとんどずれがないです。作ってて楽。
あと一歩なので、水曜日はこれを5歩に増やす予定。参加資格審査だけは何があっても通ってやる。歩行作ってて思いますが、試作5号機時代に比べて、スピードは格段に上がったし安定感もバツグンなので、なんか嬉しい。
この感動をもっと多く味わいたいものです。

歩行(四歩)
再生時間:5秒 [474KB]
こちらは正面からの映像。120msecバージョンです。重心移動は最初だけで、あとは同じ角度で歩行してます。これも今回初めてのことなんですよね。試作5号機の時は左右で違う角度じゃないと歩けなかったんで、かなり苦労しました。
で、100msecバージョンは電流が4A近く流れていたんですが、今回は3A弱くらいでした。あれだけ不安定なら無駄に電流も食いますわな。
ちなみに、距離は220mmくらいで、過去最高記録でした。
腕を上げたなヴェークヴァイザー( ̄ー ̄ )
本当は起き上がりまで行きたかったけど、やはりバグが響いてますな。これ以上でないことを強く希望して、今日の通信を終える。
作業経過をつけてみる
01:00 昨日の日記終了。歩行モーションを5歩に増やす作業開始。
01:16 5歩目の歩行ができているように見えるが、マイコン用の配線が切れかかっているためリセットがかかる。マイコン用の配線を作る
02:07 配線終わるも、逆挿ししてしまいレギュレータが燃えたと思われる。レギュレータを変えて再度チャレンジ。
02:18 H8の生存を確認。直ちに搭載作業を開始。一時的に通信できなかったりしたので死んだと思われたが、ただ単にシリアルケーブルを接続していなかっただけだった。
02:27 再起動実験成功。5歩目の調整作業開始
04:01 どうしても前のめりになってしまう。ロボットを少し休ませる。自分も休憩
09:59 起床。結局寝てしまった。歩行モーションの作成開始。
11:01 5歩目完成。ホームページ更新作業開始。
11:21
動画館の更新完了。「5歩目」の動画を掲載。
11:26 起き上がり(うつ伏せ)モーションに挑戦する。
11:31 右肩アーマーのネジが外れているのに気づく。グラグラすると肩を動かすときに邪魔になるので固定する。
11:55 左右の肩アーマーのネジ固定完了。ネジの足りない部分があったので、多少時間がかかった。作業再開。
13:30 肩アーマーのパカパカ開くのが気になる。バネの取り付けを検討。
14:26 うつ伏せからの起き上がり完成。ホームページ更新作業開始。
14:45
動画館の更新完了。「起き上がり」掲載。
14:53 腹が減ったぞー・・・。と言うわけで、しばし昼食をとることにする。
15:50 帰宅。足りなくなってたタイラップ(結束バンド)をついでに購入してくる。さぁ、参加資格審査最後の壁、自分で倒れるを作成する。
16:01 起き上がりの巻き戻しバージョンをエクセルでチマチマ作業して、再生してみた。しゃがむスピードを遅めにしたら、問題なくできました。そんな訳で、ホームページ更新作業開始。
16:12
動画館の更新完了。「倒れる」掲載。横歩きをもう一度調整する。
17:08 調整というか作り直した。ホームページ更新作業開始。
17:16
動画館の更新完了。「横歩き その2」掲載。そろそろ
アールティへ出かける準備をしなくては・・・。
煙が出る。
5歩目のモーション製作時に頻繁にリセットがかかるので、電源周りに限界を感じ始める。歩行のときにどうしてもひっぱってしまうので、切れかかっている配線から電流が流れないようだ。
そんな訳で、配線。すぐできるが、なぜか逆挿ししてしまう。実は断線を防ぐためにコネクタに熱収縮チューブを被せた上に、より線にしてしまったせいである。一応、GNDの印が付いているほうに黒い線持ってきたんだけどな。
動かないなぁ・・っと思っていたらもくもくと煙が。やられた。レギュレータが死亡したのは明らかなので、表面実装じゃないが同じ大きさの三端子レギュレータを無理やり半田付け。さっそく通信するが、通信が返ってこない。MOTファイルが書き込めるか試したら、書き込める。
で、再度書き込むが返事がない。モニタデバッガを書き込み、RAM用のMOTファイルを送信。正常に動作する。そこで気づいた・・・。SCI0の方の端子にシリアルケーブルが接続されていない!眠いせいで判断力が鈍っていると考えたくないが、まぁともかく復活した。
モーション

歩行(五歩)
再生時間:5秒 [474KB]
その後、5歩目に増やしてモーションを作るがなかなかうまくいかない。加速がつきすぎているせいか前のめりになる。強烈な眠気に負けて、そのまま寝てしまう。
翌日、EXCELを展開しCSV形式で保存されているモーションデータを展開し、全体的に修正を加える。いわゆる、同じ角度で左右の足を上げ下げするというもの。
基本的に、足踏みは振り子状態。最初に足を上げる方の足を若干伸ばして重心移動を補助した後は、上げ下げを繰り返すだけ。下げるときは、前回の日記に書いた通りである。
なんとか、繰り返せるモーションを作りたいところだが、「とにかく走る」があるので、そちらを優先しないといけない。

歩行(五歩)
再生時間:5秒 [472KB]
起き上がりは、前回の暴走事件があるまでにある程度作っていたので重心移動をいかにするかが重要なポイントでした。モーション自体はそんなに苦労しなかったんですが、その間肩アーマーのネジが外れたり、パカパカ開くのが気になりバネを仕込んだりしてたので、意外と時間がかかってしまった。
重心移動はギリギリでOK。電池が減ってきたら危ないかもなぁ・・・。
まぁ、そんな訳で残すところ倒れるモーションだけな訳ですよ。

歩行(五歩)
再生時間:6秒 [569KB]
倒れるモーションもCSVファイルが大活躍。NotePadで開いて、順番を入れ替えてみた。しゃがむスピードが早いためかこける。前方へ倒れるから、倒れるというモーションとしては問題ないがやはり壊れるのが怖いので、衝撃が少ないモーションを作る。
しゃがむスピードを遅くすることで、なんとかなった。うん、作成スピードがなかなか早くてよろしい。ひとまずこんなところであろう。
仰向けでも使える方法であることを祈りたいが・・・果たして。

歩行(五歩)
再生時間:5秒 [473KB]
横歩きの調整を行う。なんせ、最初の頃に作ったモーションなんで、かなり強引。今は歩行のノウハウがあるので、新たな世界が切り開けるはず。
なんか、すべってるなぁ・・・。前よりは距離が出ているけど。ひとまず、これで全モーション完成か。参加資格審査用のルーチンを作っておこう。
さて、このあと
アールティに行くわけだが、なんと!
データをWindows側に保存し忘れた!ショックですよ。えぇ、ショックですとも。出かける前に作ったモーションはなんだったのかと。
ないものは仕方がない。泣こうが、祈ろうが、データは戻ってこない。フフッ・・・まだだ!まだ終わらんよ!
作業経過
引き続き、作業経過をつけることとする。結構緊張感があって、いい刺激。早くモーションができると嬉しさ倍増。
00:20 帰宅。横須賀線が文字通りのすし詰め状態。なんで、こんなに人がいるんだー。今日は重装備型ででかけたので、疲れた。
02:45 やっと、更新終了。しかし、更新中に横移動のモーションを作っていた。前回より移動量がアップした。なかなか良い。これの更新も必要である。
03:22
動画館の更新完了。「横移動 その3」と「横移動 二歩」の動画を掲載。終電のダメージが消えない。風呂でぐてーっとすることにする。
03:59 復活。ひとまず、強化型フレームと、頭の設計をする。
13:22 フレームの再設計完了。加工作業に入る。
14:27 紙の貼り付け、切断、ポンチ打ち完了。
14:46 頭部の加工完了。穴空け業開始
15:15 一次穴あけ終了。折り曲げ作業開始。
15:59 折り曲げ完了。頭完了。フレームの皿加工開始。
16:06 皿加工完了。風が強い。塗装できるか?
16:19 とてもじゃないが、塗装できない。フレームは塗装不可が決定。頭は、様子を見て行うこととする。フレームの換装作業開始。
19:44 ネジの固定完了。胴体が回転しにくかったので、t0.5のアルミ板を間に挟んだ。そのため、時間がかかってしまった。
19:48 股関節のモータ端子から配線が外れているのを確認。接続しなおし。
その後・・・
歩行が若干狂ったので修正。吉村さんの走りモーションを真似てみるが、所詮は真似。真の走りには程遠かった。この走るモーションつくりは翌日にまで及ぶ。
作業経過
4:48 ニッカド電池パックx3製作完了。
5:03 006Pのニッケル水素電池を探し、発見。しかし充電器が発見できず。当日は、アルカリ電池かも。
6:11 頭部LED実装。頭部仮組み完了。
8:30 電圧監視機能、加速度センサ、圧電ブザー、頭部LEDの各種接続を完了。プログラムを書いてみる。
9:00 各種センサ及び、ポートの動作確認終了。あとは、これを有効に利用できるようにするだけ。
10:00 卒業式に行く準備をする。眠い・・・。
17:30 帰宅。本来は、卒業生の飲み会があるが、大会のために欠席を選んだ。時間は残り少ない、残された時間を有効に使うことにする。現在風が弱い。今が塗装のチャンス。頭部塗装用意。
18:30 塗装完了。装着作業開始。
23:04 夕食後、あまりの眠気に死亡。こんなことなら6時間寝てた方がマシだったかも。電圧監視機能を実装。表示周期を20msec x 64 =1280msecで行うこととした。次は、参加資格審査のモーションを通しで行うプログラム作り。
作業経過
0:37 再生途中で、歩行がおかしいことに気づく。片方の歩幅が狭いため躓きそうになるので、両方同じ歩幅に設定しなおす。安定性が上がった。モーションを順番に再生していくと、歩行や横歩きに移行する際にこけることが判明。モーション再生前にかがむモーションを入れて解決。さぁ、デモ系の再生プログラムを組もう。
3:07 電圧監視+ブザーの連動を確認。途中、5VとGNDがショートしてたので探すのに30分ほどかかった。加速度センサをモーションに使えるように調整。
3:27 モーションエディットモード、参加資格審査モードの切り替え機能搭載。タイマーかけずに連続でやっているが、Waitを入れたほうがよさそうなので、Waitを入れて再チャレンジ。
6:15 走る練習をしていたところ、足首のブラケットが歪んでいることに気づく。やはり歩行に比べて負荷が大きかったようだ。股関節の強化ブラケットを量産するか悩む。
6:20 このままでは歩行も安定しないので、量産することに決めた。ここで終わるわけにはいかない。今まで以上の加工スピードで作るべく気合を入れる。
7:15 印刷、貼り付け、部品ごとの切断、ポンチ打ち完了。これより穴あけを開始。
7:30 穴あけ終了。ハンドニブラによる切断作業と折りまげを行う。
8:00 時間切れ。会場で交換作業を行うことにする。移動準備開始
8:45 出発。到着予定は9;10頃の予定。
9:10 受付終了。部屋は3階なのでエレベータで移動。(来なかった)
9:20 作業開始。3階は狭いのなんのって・・・作業するのに一苦労。急いで解体作業に取り掛かる。
9:45 右ひざの換装作業終了。次は足首。
10:15 右足首の換装作業終了。もう時間がない。問題である右足首の換装が終了したので、参加資格審査に行く。
10:20 審査終了・・・なんとか通過。ここまでは予定通りだが、歩行がなんか不安定。調整が必要。
10:50 順番を確認。出番は9番目!?午前中かいっ!それまでに歩行を安定させたいが、机の上では5歩目がオーバーして修正ができない。練習用の板では、後ろに転ぶ。修正、修正。
11:15 順番が呼ばれた・・・アウト。調整がうまくいかずに出番である。
11:30頃 歩行でやはりこける。横歩きは、倒れた後に手で起こした際に横歩きのモーションをやっていたので、見せられず。走るはやはり転んだ。起き上がりも再生がうまくいかなかった。
俺のROBO-ONEは終わった・・・
久々に、モーションを手軽に作れる機体に仕上がったのに・・・。
ヴェークヴァイザーよ・・・すまないなぁ。おまえを予選で活躍できるように頑張ってきたんだが、そうもいかなかったようだ。許してくれ・・・。
その後・・・
Wegweiser IIは、ラストから数えて3番目の80位でした。まぁ、あの結果なら当然なんですが・・・。今まで予選に参加してきた中で、最低な予選だった。未完成丸出しのアレでは・・・これならば棄権した方が良かったかもしれない。
懇親会では、ビールは2杯ぐらいしか飲んでいないのだが、無理やったせいか途中で数回意識が飛んでた。そんな訳で、二次会も行かずに、そのまま帰宅した。
本選の日だが・・・
なんか、行く気がしない・・・。やたら眠いし、疲れが残ってた。ほぼ一日中睡眠ばっかしてました。
兎さんのDVD待ち・・・申し訳ない。
日記を読み返すと、ロウソクの炎が最後赤々と燃えているような感じ。今はもう消えてる・・・かな。
大きな星がついたり消えたりしている・・・。おおきい!〜彗星かな!いや、違う・・・違うな彗星ならもっとバ〜って光るもんな。(壊)
昇圧回路
006Pのニッケル水素を充電するのは面倒だし、場所とるし、重いし・・・ってことで、ちょっと検索してみた。
電子なページ ☆第二回☆
上記TOPページ
DCDC昇圧コンバータ
上記TOPページ
今回調べて、初めて知ったのだが昇圧回路にはコイルを使う方法と、コンデンサとダイオードを使うチャージポンプ式の2種類があるらしい。チャージポンプ式の方が作りやすそうなので、こちらを作ってみることにした。
で、材料がないので千石で部品を買ってこようと思う。
ちなみに、マイコンで電流をいくらつかっているか測ってみたが、0.9mAと出た。これって本当の値か????
買い物
ひとまず、電解コンデンサや抵抗、4069をゲット。大概の物は揃ったのだが、ショットキバリアダイオードの1S4(1N4?)が見つからない。
通常のダイオードだと、電圧降下が1Vもあるのでちと使えない。なるべくなら、電圧降下の少ないものを選びたいところ。結局、鈴商にD1NS4というダイオードがそれっぽい。検索したら、
ココらしい。1A時にVFは0.55Vだとか。まぁ、良い方かなと。
ひとまず、試作してどうか調べてみますか。3.3Vで5.5V出力できたら、意外といけそうだ。
6Vの安定化電源を返しに行ったのだが・・・
アールティから安定化電源をお借りしていたので、返しに行ったら吉村隊長がいた。もう帰ったと思ってたんで、びっくり。吉村さんもロボットビリヤードに挑戦して、1分13秒を叩き出したそうだ。その様子は、
こちらでご覧ください。
吉村さんに、ジャイロや足裏、走りについて聞いたりした。真の走りはやっぱり無理っぽいです。自分のマシン。
Wegweiserの1号機と2号機をお台場へ運んだのは、歩行テストが必要なのはあの2機だけだった、からだな?( ̄ー ̄ )
あるんだ・・・3号機が・・・。(。 _ 。 )
ありませんっ!
収穫

 アールティ
アールティにて、ねじ浅井さんのネジが入荷したそうで、今なら5g分のネジをサンプルとして頂けるとの事。これから、浅井さんのネジも取り扱うそうです。
また、ケミカルウッドのサンプルも入荷したそうで、こちらもサンプルとしてもっていっていいそうです。
今のところモデラがないので使えないが、入手してから考えることにする。
その後、柴田さんも来て・・・
柴田さんもロボットビリヤードに挑戦されていましたが、どうしても前進のときに転んでしまい、うまくいきません。後進はスムーズでなかなかよろしい感じ。
足裏の修正と、走りについて神からのお告げがあり、足裏を付け直してチャレンジしてました。ちょっと位置の修正がうまくいかなかったようですが、なかなかいい感じだったようで、歩行が安定するかも。
自分も試してみないと・・・。そのうち写真でアップしますね。
吉村さんと共に・・・
飲みに行く話しになり、そのまま近くの居酒屋へ・・・。その中で、面白ネタは神がなおきち氏に送ったというお告げの話。なおきち氏の話では耐えられないほどの殺傷力を秘めた電波攻撃にさらされたようで・・・。
その一部を紹介。あ、他の方にもいろいろ書いて頂いたので、そちらも紹介。一部危険な表現があったため、こちらの方で修正しました。予めご了承ください。っと、注意書きを書いてっと。それではどうぞ。

よっしー画伯 ITO画伯 よっしー画伯


NAOKICHI画伯 48画伯
皆さん強烈ですが、確かに吉村さんからこんな画像が延々と送られてくるとちょっと困るかも・・・。笑いすぎて・・・。職場では見れんな・・・。
おまけ・・・
例のショットキバリアダイオード探していたら、
鈴商のホームページを発見。い・・・いつの間に!
[BACK]
[TOP]
[NEXT]
Copyright (C) 2006 U-hirohito All rights reserved.
 写真の右の方を見て頂けるだろうか?お亡くなり寸前のブラケットの様子が分かると思います。このままじゃ使いものにならなくなるのは明白。恐らく、加工時にホールソウで穴を空けた後に折りまげを行ったと思われる。
写真の右の方を見て頂けるだろうか?お亡くなり寸前のブラケットの様子が分かると思います。このままじゃ使いものにならなくなるのは明白。恐らく、加工時にホールソウで穴を空けた後に折りまげを行ったと思われる。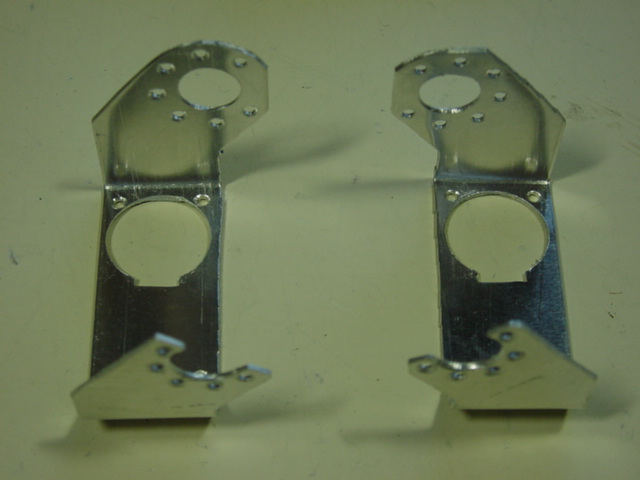 しゃーないので、作り直し決定。穴の位置も1mmほどずらして折り曲げの時に変な場所が曲がらないようにする。4隅を固定するのになぜか存在していたフランジはいらんので削除。
しゃーないので、作り直し決定。穴の位置も1mmほどずらして折り曲げの時に変な場所が曲がらないようにする。4隅を固定するのになぜか存在していたフランジはいらんので削除。