▼3線で制御
 2004年10月上旬
2004年10月上旬にHブリッジをロジックICで3線制御するという方法を書いたことがあるんですが、
宮田さんのHPにあるLow-side PWMの回路図でやってないんですよね。
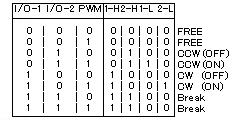
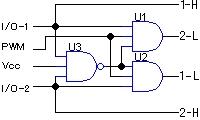
私がやった回路は、上下とも小信号用FETを使うというものです。なので、過去に書いた回路図通りやると燃えます。で、多少修正した回路図と真理値表を忘れる前に、書いておくことにします。
ただ、単にU1とU2をNANDからANDに変えただけなんですけどね・・・。U3も3入力ではなく、2入力にするべきですね。もしも、RCサーボのケースに入れるなら、1回路だけ入ったNOT回路を、U3の出力に入れて、3入力のロジックICを1個使った感じにしたいですね。そうしたら小さくて済みますしね。
その場合も、モーター用の配線2本、ポテンショメータに1本(信号線)、ロジック回路用に4本(5Vと信号線)計7本必要ですね。ポテンショメータとロジックICの配線をシールド線でやれば、マシにはなるかも。
とりあえず、アイディアだけ書いて、やる気になったときに読み返すとしよう。
▼ホームページの移転
現在、ホームページの移転作業中ですが、なかなかに作業が進まない。とりあえず、fc2webへの移転は完了したので、残りはトクトクの方の構造改革のみ。
一応、トクトクの方には動画と、日記のみの別館という形になります。理由は、際限なく増えていく広告にいい加減嫌気がさしたという事です。
それと、動画以外のファイルでも200MBくらいしかないので、1GBのみしかおけないfc2webでも十分いけるんですよね。まぁ、広告が下のアレだけというのは、とても嬉しい物です。
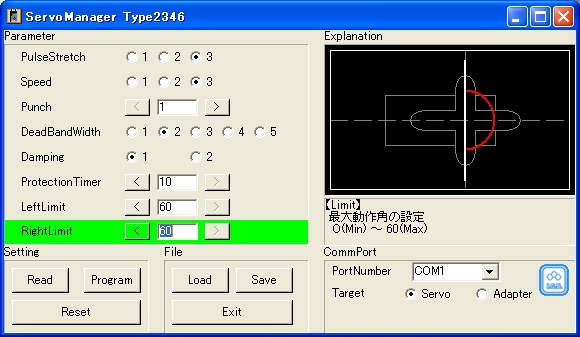
▼サーボマネージャー
ここで、ロボットネタを少々。現在でも現役である無印のKRS-2346ICSの動作角度は、最近まで180度ではありませんでした。150°〜160°くらいまでしか動かなかったんです。ずっとおかしいなぁ・・・と思ってたんですよ。
近藤さんのHPに2346専用(Red Versionとは別に)のサーボマネージャーを発見!ダウンロードして確認してみると、180°まで動く。
なるほどね・・・こういうことか。なんで、気づくのにこんなに掛かったのかというと・・・。
ICS用のコネクタを買った時に付いてきた、フロッピーに入ったサーボマネージャーを使っていたからです。アレは、2344などの、一般的なRCサーボ用のソフトだったので、180°の設定ができなかったのでした。
第二に、配線を純正の物ではなく、取り替えてしまったので、設定をするのが非常に面倒になってしまったことなども挙げられます。う〜ん・・・なんか、お間抜けな話ですな。
▼別館開業
なんだかんだで、最終更新日から2ヶ月立ってしまいましたが、ようやく更新再開。とりあえず、別館は他の方もやられている、TOPページに日記を掲載するという形にして、再スタート。日記だけ見れればいいや・・・と思う方は、こちらをお気に入りなどに登録という方向で。(^−^;
▼目標は、飛騨高山にあり。
ひとまず、DASHタイムトライアルには、動かせましたが・・・。参加したのは3回中、二回目のみ。1回目は、古いPCを持っていったので、起動に時間がかかり、タイムオーバー。2回目は、歩いたけど激遅っ。3回目は、軌道の修正をして、その状態で動かさず、順番を待ったが、歩いた途端、足首の制御基板の信号線が外れかけ状態になっており、数歩歩いて、こけたので、アウト。
配線はだいぶ綺麗になったが、まだまだらしい。歩行も足踏みはある程度(今までの歩きに比べれば)早いものの、歩幅が狭いため、遅い。(約20mmくらい・・・のはず)
久々に参加して、自らのダメダメさを痛感いたしました。っというわけで、目標を第8回大会の予選突破、本選出場を目指してがんばろう。
そうであれたら、一番いい。だが・・・それで間に合うのかね?
脳裏をよぎる。今までは、新しいことを始めて、ギリギリまでかかり失敗していた。2ヶ月くらい前には、動く状態にしておけば、安心だろう。とりあえず、現在の問題点を修正することとする。
▼昨日から寝てなかったり
大学の課題を始めたら、気が付いたら朝になっていた。う〜ん、眠い。眠がっている訳にもいかんので、そのまま出かける。その後、用事があったので、ロボットは触れず。
まぁ、予想通りROBO-ONEビギナーズは出られないようだ。今年はさらに忙しくなりそうだから、改修を早めに終わらせないと危険だ。
とりあえず、うちのマシンにMICRO-MGを使うのは無理そうだという話から、上半身を2346化する方向で行くことになった。それは、すなわち設計のやりなおしを意味する。上半身のほとんどがMICRO-MGなのだから当然である。
この際なので、上半身の構造を変更しようかとも思ったが、現在の上半身以上のアイディアは生まれず、若干の変更を加えるだけに留まりそうだ。
▼胴体の設計など
やっと上半身の設計を終える。没作が3作あり、これは4作目である。4作目は外装をつけなければ、非常にシンプルになるように設計し、構造も強化されている・・・はず。
目的が、腰のヨー軸用のRCサーボがGWSのS03Tなので、これをPS-2174FET(近藤)に変更し、
サーボマウントAを使った設計にしてみる。
このパーツを有効に利用することで、カレイナットの使用を少なくし、ネジがばかになっても交換がすぐ行えるようにする。使用するのが初めてであるので、どうなることやら。
まだマイコンが搭載されるバックパックを設計していないが、これはここに入るマイコンボードにあった設計をしたい。未だにボード周りの配線問題は解決していないので、この機会にうまい方法を考えたい。
▼胴体が終わったら
腕と腰の再設計が残っていますが、基本的な構造はあまり変える必要はなく、KRS-2346ICSなどのRCサーボが装着できれば良いので・・・。
2350自体が、しばらく入ってこないようなので、その間にモーションエディタの修正や、ロボット制御プログラムの追加修正など、やることはまだまだあります。
それらを大会2ヶ月前くらいまでには終えたい所ですが、少々難しいかも。もちっと、しっかりやらないと。
▼ここは・・・地獄だ。(←暑さが)
今週の月曜日より、某所にてロボットの組み立ての手伝いをしています。自分の作っているロボットよりも大きいので、構造が大分違い、いい刺激になっています。
ただ、作業場が凄く暑いのが難点。14:30頃では、作業中、汗がダラダラと流れっぱなし。水分補給しないと、倒れかねない。まぁ、それだけなので問題なし。
今日の時点で全体の10%ほど完成。まだまだ先は長いようだ。精神的には、まだまだいけるのだけど、昼間の暑さにやられたらしく、夕方頃は効率がかなり下がった。
とりあえず、疲れを取って明日に備えたい。
▼ロボット進んでないよっ・・・何やってんのぉ!(っと怒られそう)
先ほどの話の通り、進捗ゼロ。進んだといえば、VHDL関連が若干進んだかな。今更であるが、デザインウェーブのCPLD特集の号を引っ張ってきて、インストールしてみる。
今回は、VHDLでやろうと考えていたのでLeonard Spectrumをインストールし、無償ライセンスをゲットすべくアルテラのホームページへ行く。
ところが、どこを探してもそんな物はない。Googleで検索してみると、どうやら無償ライセンスは終わったらしいという記事を見つける。
で、少々調べてみると、アルテラで新しくQuartus II Web Editionという物があり、VHDLはこれでできるらしい。さっそくインストールし、サンプルをコンパイルして、シミュレーションもしてみた。
まぁ、サンプルなのだから当然動くのであるが、まだCPLDへのダウンロードはやっていない。なぜなら配線がまだだからだ。配線をちょいちょいとやって、早く動かしてみたいものである。
▼初めてKHR−1を組み立てる
ちょいと、組み立てる機会があったので、KHR-1を組み立てた。自分のロボットはRCサーボを分解して使ったり、配線を変えたりと面倒な作業が多いが、KHR-1はそんな作業をせずに組み立てられるので、すぐ組みあがった。
具体的には6時間30分ほどで、トリム調整、ホームポジションの設定、歩行サンプルの再生まで終わる。ヴェークヴァイザーの場合、5時間30分でどこまでできるかというと、片足の組み立てと配線が終わるくらいである。
シンプルで作りやすい構造っていいですね。1台くらいはシンプルで軽いロボットを作りたいけど、資金が・・・・・・(ーー;
▼イクシスリサーチでバイトを募集
イクシスリサーチにて、
アルバイト&正社員募集の記事を発見。アルバイトでも、ロボット開発やボードの製作に携われるらしい。
ロボット作りの経験地を増やしつつ、お金が貰えるのだからおいしいかも?
[BACK]
[TOP]
[NEXT]
Copyright (C) 2005 U-hirohito All rights reserved.