▼またしても、更新止まる。
レポートやらなんやらで、結局作業は進まなかったのでした。どうも、お久しぶりです。ROBO―ONEの登録から早1週間くらいが経った訳ですが、加工作業は止まったままです。そんな訳で、その他の事を進めてみました。今回はせっかくなので、いろいろと紹介してみようと思います。では、どうぞ。▼金曜日、買い物

 はい、さすがにそろそろまずいので、必要な部品を購入しにいきました。上半身のアクチュエータも今回新しくするので、購入しておきました。Micro-MGと、懐かしのPS-2174FETです。 主要部分をパワーアップしつつ、軽量化し、スピードも向上。これが裏目に出るか、どうなるのかは分かりませんね。うまく行って欲しい。
はい、さすがにそろそろまずいので、必要な部品を購入しにいきました。上半身のアクチュエータも今回新しくするので、購入しておきました。Micro-MGと、懐かしのPS-2174FETです。 主要部分をパワーアップしつつ、軽量化し、スピードも向上。これが裏目に出るか、どうなるのかは分かりませんね。うまく行って欲しい。
 で、ロボット王国でローハイトサーボホーンについて王様に話を聞かせて頂き、当初の予定では購入するつもりは無かったが、入手することにした。というのも、現状の設計ではRCサーボホーンと、フレームの間に、プラ板などを挟まなくてはいけなくなるのだ。 こいつを使えば、その作業は不要になる。これで時間を短縮できるというものです。もうひとつ、赤外線のトランシーバですが、これはそのうちやってみようと思います。
で、ロボット王国でローハイトサーボホーンについて王様に話を聞かせて頂き、当初の予定では購入するつもりは無かったが、入手することにした。というのも、現状の設計ではRCサーボホーンと、フレームの間に、プラ板などを挟まなくてはいけなくなるのだ。 こいつを使えば、その作業は不要になる。これで時間を短縮できるというものです。もうひとつ、赤外線のトランシーバですが、これはそのうちやってみようと思います。あとは、ここには載せませんでしたが、M2の皿ネジ、なべネジを西川で購入。準備は整った。
▼塗装
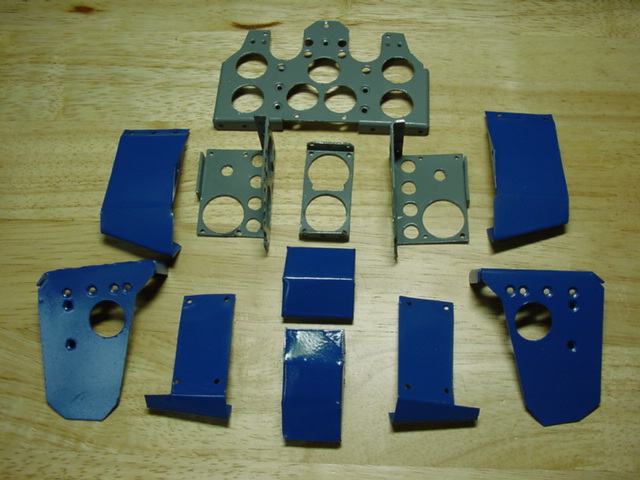 まずは、胴体パーツを・・・。ほとんど青いですね。まぁ、前回のロボットと同じようなカラーリングになるから当然ですが。(^-^;これで全部と言う訳ではありません。これだけでは、RCサーボを保持する事も不可能です。
まずは、胴体パーツを・・・。ほとんど青いですね。まぁ、前回のロボットと同じようなカラーリングになるから当然ですが。(^-^;これで全部と言う訳ではありません。これだけでは、RCサーボを保持する事も不可能です。では、次へ行きましょうか。
 はい、次は前回のロボットから付けるようになったCPUカバーです。今、前回と言いましたが、そうなんです。前回より前のロボットはそんなもの無かったんですね。だから、倒れるとたまにマイコンがショートして死にました。良識ある皆さん、CPUカバーは付けましょう。(普通は付けてるって。)今回は、2パーツ構成になっていますが、それには訳があります。これについては、のちほど。
はい、次は前回のロボットから付けるようになったCPUカバーです。今、前回と言いましたが、そうなんです。前回より前のロボットはそんなもの無かったんですね。だから、倒れるとたまにマイコンがショートして死にました。良識ある皆さん、CPUカバーは付けましょう。(普通は付けてるって。)今回は、2パーツ構成になっていますが、それには訳があります。これについては、のちほど。 これは、腰のパーツです。あと1パーツなんですが、そのメインパーツは穴あけがまだ終了してないんで、塗装はしていません。それが来れば、完成なんですけどね。ちなみに、穴を間違えてφ1.5の所をφ2.0で空けてしまったため、作り直してるんです。
これは、腰のパーツです。あと1パーツなんですが、そのメインパーツは穴あけがまだ終了してないんで、塗装はしていません。それが来れば、完成なんですけどね。ちなみに、穴を間違えてφ1.5の所をφ2.0で空けてしまったため、作り直してるんです。このミス、結構致命的だったんで・・・(^-^;
 次ッス。胴体パーツの残り部分ですね。この白は、青色や灰色の後で塗装したので、若干撮影時間がずれてます。骨組みになるのは大きい1パーツのみで残りは飾りです。(^-^;まぁ、分かる人はどこに付くか想像できますよね。って、今までの日記にアルミ状態の仮組み写真があったっけ・・・(||| ̄□ ̄)
次ッス。胴体パーツの残り部分ですね。この白は、青色や灰色の後で塗装したので、若干撮影時間がずれてます。骨組みになるのは大きい1パーツのみで残りは飾りです。(^-^;まぁ、分かる人はどこに付くか想像できますよね。って、今までの日記にアルミ状態の仮組み写真があったっけ・・・(||| ̄□ ̄)あ、いえ問題なんてありませんよ。問題なんて・・・(^-^;
▼バックパックのヒ・ミ・ツ
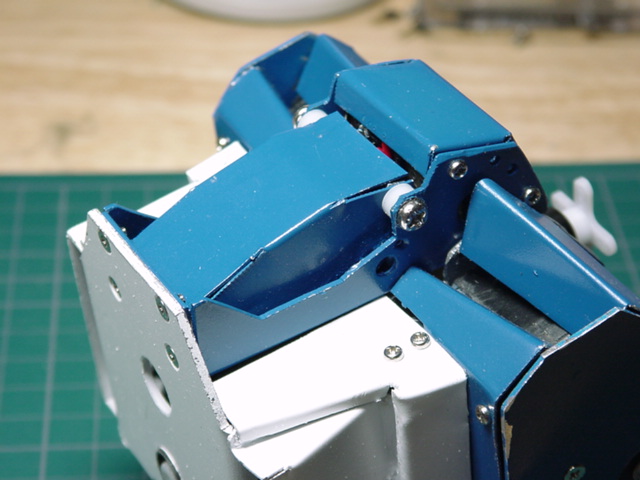
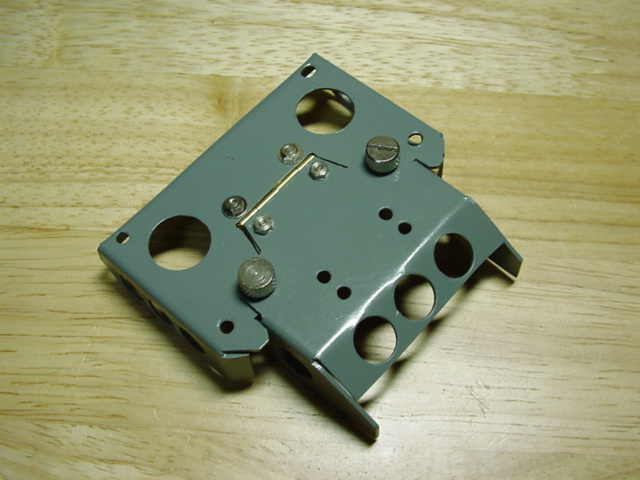 さて、最後にこのCPUカバー(バックパック)の説明です。見ての通り、丁番をつけてあるので、開閉できます。実はこのパーツは、充電池が飛び出すのを防ぐためのパーツでもあるんです。分かりづらいと思いますので、充電池が完成したら、またご紹介します。
さて、最後にこのCPUカバー(バックパック)の説明です。見ての通り、丁番をつけてあるので、開閉できます。実はこのパーツは、充電池が飛び出すのを防ぐためのパーツでもあるんです。分かりづらいと思いますので、充電池が完成したら、またご紹介します。前回のロボットは、充電池もマジックテープで付けるだけのお粗末な状態でした。
 受信機も、マイコン用電池も、行き場を無くして、適当な場所にとってつけられているだけ。それではまずいと考え、今回はこの胴体にほとんどのパーツを収納できるようにしました。一応ネジ二本で固定可能であります。RC受信機もこのバックパックに搭載されたりします。今回は、マイコンボードが自作なんで、結構小さく作れました。失敗するとしたら、自作したマイコンボードのせいでしょうね・・・きっと。
受信機も、マイコン用電池も、行き場を無くして、適当な場所にとってつけられているだけ。それではまずいと考え、今回はこの胴体にほとんどのパーツを収納できるようにしました。一応ネジ二本で固定可能であります。RC受信機もこのバックパックに搭載されたりします。今回は、マイコンボードが自作なんで、結構小さく作れました。失敗するとしたら、自作したマイコンボードのせいでしょうね・・・きっと。▼じゃいろ〜
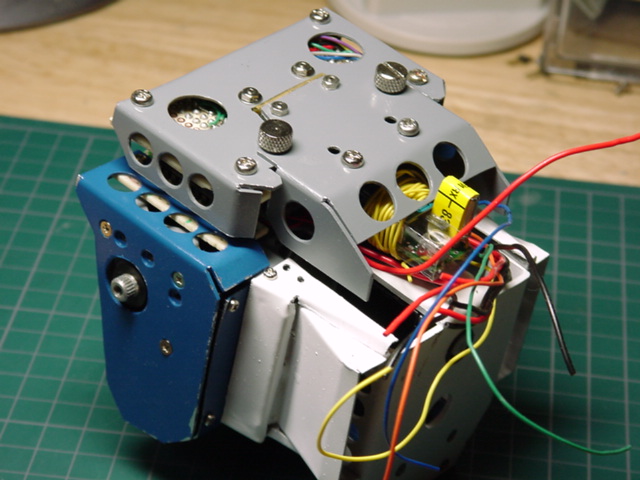
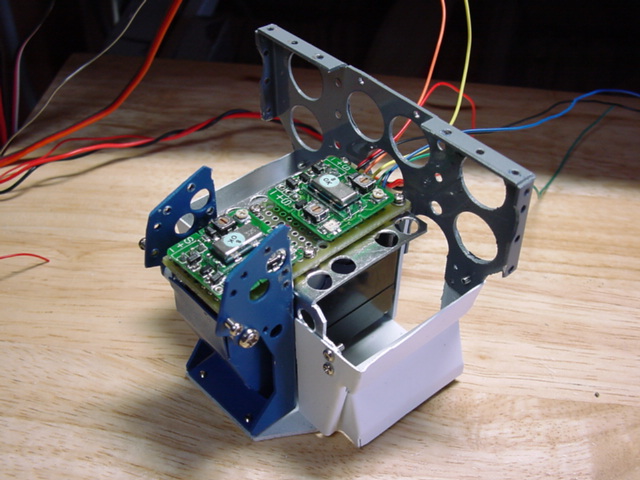 前に購入したGWSのジャイロをついに搭載する時がきました。場所はこの辺です。結構悩みましたが、なんとかこのスペースを構築できました。当初は、ケースに入ったまま使おうと思いましたが、どう設計しても、入れるスペースがなかったんです。
前に購入したGWSのジャイロをついに搭載する時がきました。場所はこの辺です。結構悩みましたが、なんとかこのスペースを構築できました。当初は、ケースに入ったまま使おうと思いましたが、どう設計しても、入れるスペースがなかったんです。たかが数ミリ、されど数ミリ。そんな訳で、最終手段。分解して再構築しました。何が問題かと言いますと、あの辺な出っ張りですね。箱状態なら楽だったんですが、デザインのせいで、取り付けしにくかったもんで・・・。ちなみにケース無い方がコンパクト。
時間が無い状態でできるか、分かりませんが、間に合えば、これで姿勢制御したいと思います。歩行が安定すると、非常に安心できるのですが・・・果たして!?
▼組上げ
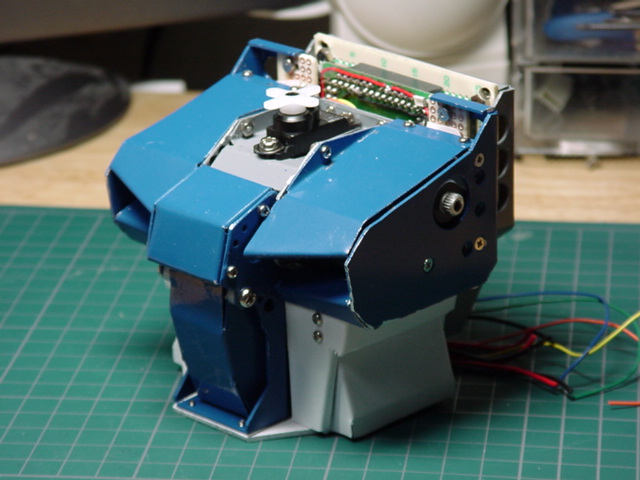
 あっ!と思ったら、できてました・・・胴体だけ。(^-^;前回の胴体を元に再設計しているので、あんまり変わらないはず。カラーに関しては、コクピットが白から青へ変わったくらいです。
あっ!と思ったら、できてました・・・胴体だけ。(^-^;前回の胴体を元に再設計しているので、あんまり変わらないはず。カラーに関しては、コクピットが白から青へ変わったくらいです。大概のパーツは付けたし、ある程度配線も完了しています。が、RCサーボの電源をどうまとめるか、未だに決まっていない。なるべくなら固定したいが、う〜む。
▼コクピット
 ヴェークヴァイザ―のトレードマークになっているかは知りませんが、コクピット、今回も付いてます。しかも、今回はちゃんと可動範囲が確保されています。
ヴェークヴァイザ―のトレードマークになっているかは知りませんが、コクピット、今回も付いてます。しかも、今回はちゃんと可動範囲が確保されています。「コクピットは飾りです。偉い人にはそれが分からんのです。」
という、名台詞をちょっと変えたようなのが聞こえてきそうです。当初の予定では、そのつもりでした。しかし、ある時、神が降臨。
「ユウは、スイッチ設置を閃いた。」
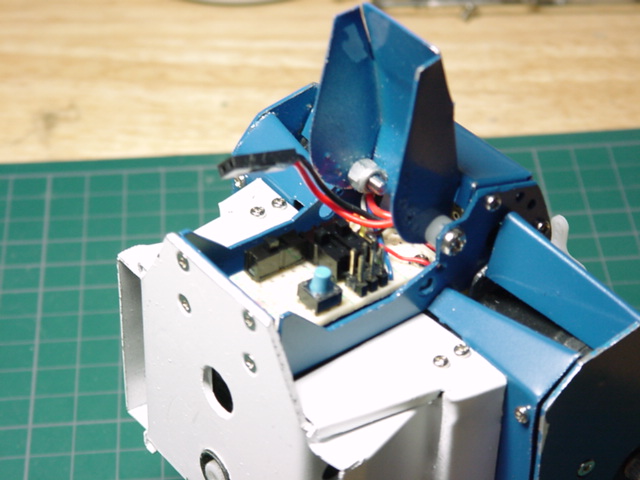
そんな訳で、スイッチ類、RS232C用端子を設置。無駄スペースをうまく活用。あとは、モーション製作時に使い心地はどうなのか?それ次第ですね。スイッチはともかく、RS232C用ケーブルが垂れ下がっている状態でも大丈夫なのか気になる所。まぁ、よほどひどかったら改善策を考える事でしょう。
ちなみに、電源ケーブルや、シリアルケーブルを繋げると下のようになります。
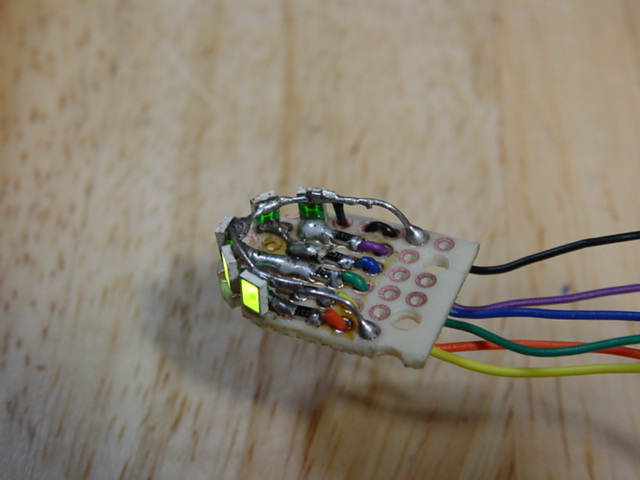
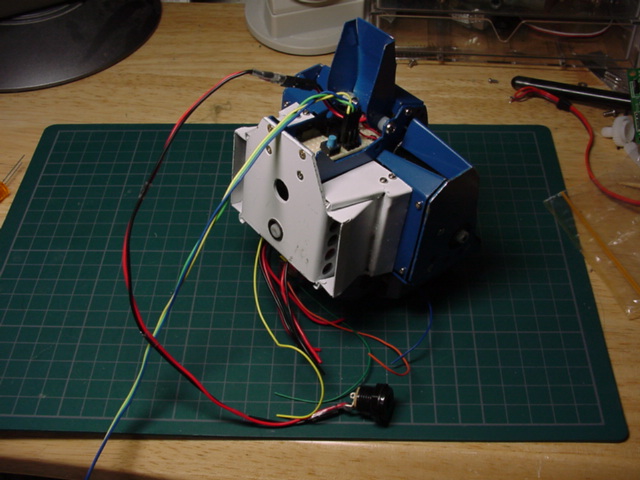 もしかしたら、腰にも電源用ケーブルやRS232C用ケーブルを増設するかもしれません。実際その方が、モーション作成時に有効な気もしますし。マイコンのデータ書き換えや、調整時はコクピットからの方が楽かな。
もしかしたら、腰にも電源用ケーブルやRS232C用ケーブルを増設するかもしれません。実際その方が、モーション作成時に有効な気もしますし。マイコンのデータ書き換えや、調整時はコクピットからの方が楽かな。それと余談ですが、新型自作マイコンボード、失敗しました。仕方ないので、前に作って成功した自作ボードを投入することが決定。まぁ、今更作っている時間、無いですからね。そんなことしてるくらいなら、ソフト作れと・・・(^-^;
ちなみに、旧型はちゃんと動きましたよ。(  ̄▽ ̄)
余談その2、胴体のアルミだけならば95gです。電池以外のCPUやジャイロ、RCサーボなどを含むと360gです。