▼上半身の設計
そろそろ上半身を設計しないと間に合わないので、設計を始める。今回の悩みは、安価なRCサーボをどれにするか・・・である。 GWS-S03Tはパワーはあるものの、大きすぎるのだ。
裏蓋を外せば、大分小さくなる(26mmと計測)
しかし、モーターは出っ張っているので困る(ケースも合わせて39mmくらい) しかし、トルクの魅力に惹かれ、これをベースに設計する。
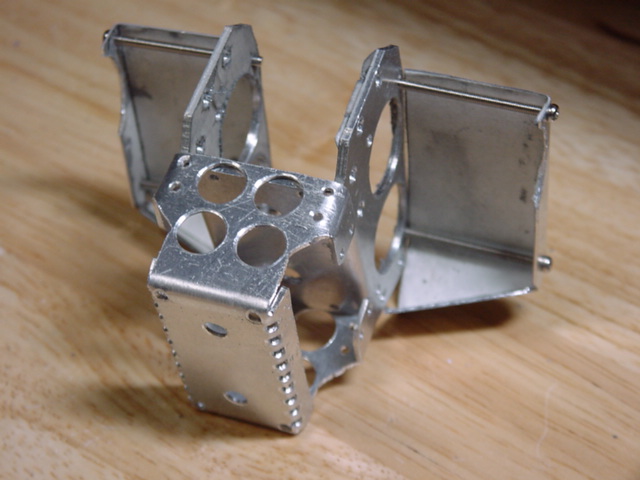
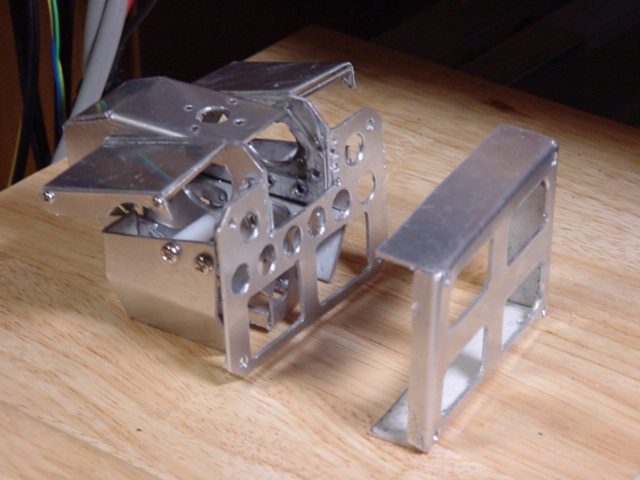
で、胸部の設計が終わった時点で、計10パーツ。
ハリボテパーツが4個なので、6パーツ作れば、胴体は完成となる。
やっぱりアレなデザインであると分かりつつも、自分がやるとこうなってしまうようだ。
部品が完成次第、写真を掲載することにする。
▼オペアンプ
 前回敢え無く敗退したオペアンプである。今回はバンダイカップの時の宮田さんのアドバイスを取り入れて再挑戦する。空中配線もやめて、基板にテスト用の回路を作ってからにする。
前回敢え無く敗退したオペアンプである。今回はバンダイカップの時の宮田さんのアドバイスを取り入れて再挑戦する。空中配線もやめて、基板にテスト用の回路を作ってからにする。やはり自分の場合、どこが問題なのか分からない事が多いので、こう順を追って進めていく方が良いようだ。
とりあえず、ポテンショメータの信号を、マイコンに入れる中間にオペアンプを入れるのだが、その構成は次の通りだ。
1.ポテンショメータから出た信号線を、抵抗器を使って1/2に分圧する。
抵抗器は宮田さんのアドバイスに基づき、47KΩを二つ使用
(信号線) -w- (出力) -w- (GND)
2.次に非反転増幅器に接続(LMC662)
ここで使う抵抗器は二つとも3kΩにした。
これで、試しに動かした所きちんと動作した。空中配線バージョンでも試したが、問題なし。うん、なかなか良い。これで俺サーボに接続すれば問題なしだ。
▼RC制御基板のフィードバック
今回KRS-2346ICSを使っていて、ほぼずれはないものの、股関節付近はやはりそこそこずれる。電源が5Vだし、4Aしか流れないせいかも知れないが、なんとかならないものかと。そこで考えついたのがRCサーボの制御基板に接続されているポテンショメータの信号を拝借し、マイコンでずれを修正するというもの。
しかし、前にも(3号機解体前)S3003で実験したものの、動作がおかしくなったことがある。原因は、マイコンが電流を吸ってしまったのが原因だと推測。それを解決しない限り、ポテンショメータの値を読むことは不可能だった。
ここで登場するのがオペアンプだ。話によると、入力端子は電流を吸わないのだそうだ。これならば、RCサーボの制御をおかしくしないで、ずれを修正できるではないか!
しかし、ここでまた問題が!ロボットを動かす電源は安定している訳ではなく、使っていれば電圧は降下していくし、激しい動作の時は一時的に電圧降下することもある。これでは、正しい値を読むことなど、不可能だ。
で、後輩に実験(全て5Vでやった)をやらせてみた結果、どうもポテンショメータに与えている電圧はレギュレーターを通してやっているらしいとのこと。
もしこれが本当ならば、安定したデータを得ることが可能だ。という訳で、先程成功したオペアンプを使って、ポテンショメータの基準電圧を調査した。電源は2種類!秋月のACアダプター(5V4A)と、使用予定の秋月製ニッケル水素充電池(6V2A[実測値5.44V])を使った。
A/D変換後の結果はどちらも、621〜622だった。
H8のA/Dコンバータは10ビットなので、それから逆算すると、約3.04Vとで一定ということになる。
今の所、計測までしかやってないので、うまく行くかは、実際にプログラムを組むしかない。しかし、これで成功すれば現在の角度も分かるし、どのくらいのトルクがかかっているかも分かるだろう。