▼夢
今朝の夢で、森永さんが新型のマウスを迷路で走らせている夢を見た。う〜ん、なんでだろう・・・?寝る前に第三回ROBO-ONEの予選映像(MF)を見たせいかもしれない。あの動きは何度見ても、凄いなと思いますね。夏の大会では修行の成果が見られそうです。それにしてもこの夢は、二ヶ月遅れの初夢なのか?何にしても縁起が良い気がする。(笑)
▼プログラム〜
さて、今回はいよいよ歩行に挑戦したい所。しかし、現実は甘くない。壊れた「ポートA」から「ポート3」または、「ポート1」に変更しなければ、動かないのだ。で、変更したら、ぐにゃぐにゃと変な動きをし始める。
「む〜、とりあえずプログラムを眺めるか。」2,3時間、色々な場所の値を表示したりして、調査に明け暮れる。「Σ( ̄▽ ̄;)!!みつけたぁ!!」原因は至って簡単。設定の変更が一部されていなかったのだ。「ポート3」に変更してるのに、パルスを立ち上げる部分がポートAの設定「PA.DR.BYTE=0xff;」のまま!!これじゃ、正常に動くはずがない。角度0°の部分がいきなり始まったようなもの。自分の場合、大概こんなミスばかりだったりする。プログラムは70%くらいがデバッグ作業なのだろうか?う〜む(悩
今後このような失敗をしないように、「#define Port1 ポート番号」を加え、ポート変更したら全て変更してくれるようにした。
プログラムが長くなると、些細なミスでも膨大な時間が掛かってしまったりするようである。(自分だけですかね?(^-^;)
▼初期値設定。屈伸GO
問題の無くなった足の初期値を合わせ、いざ屈伸!しかし、ここでも問題がっ!屈伸して戻ると、右足がちゃんと元に戻らない。(少し足が曲がった状態)なかなか厳しい状態だ。とりあえず、ちょっと屈伸した状態ならば、ちゃんと立っていられるので、この状態で足踏みを強行!!体重移動がきちんとされていないのか、股関節が左足の自重に負けて下がる。
所詮、計算で求めた値である。シミュレーションと現実は違うのだ。やはり、この股関節部分だけADでフィードバック掛けた方がよいような気がする。PID制御ができない以上これで行くしかない。
フィードバックも重要だが、右足が曲がった状態では、今後に支障をきたしそうだ。う〜ん、明日はこの部分の調整をしなければならないかな。
そして、屈伸途中で分かった事がもうひとつ。足を曲げれば曲げるほど、リンクの働きが悪くなり、設定した角度通り曲がってくれないのである。
とりあえず、今日はここまで。
▼随時更新、やってみよう!
今まで、「〜時現在」と書くと、その日の内の更新がされてなかったりしたが、今回は、がんばってみようと思います。行けるかなぁ・・・怪しい限り。
▼原因発覚その1?

先日、タイロッドのせいでうまく屈伸できないといいました。が、そうとは限らないと言う事実が判明。現在は、
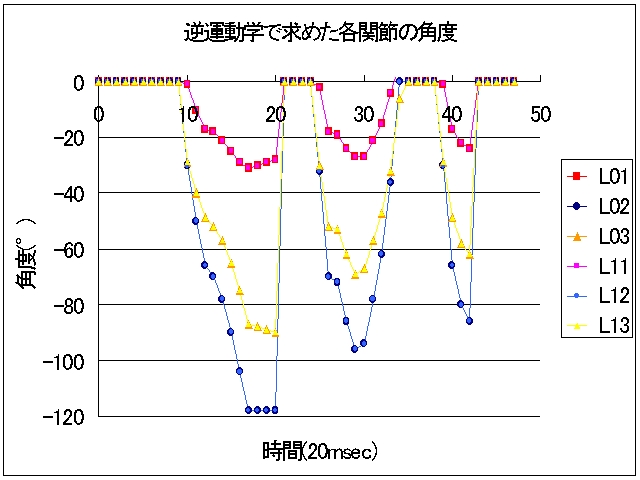
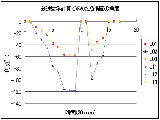
逆運動学計算で各関節の角度を求める方式になっているのだが、その計算に誤りがあるみたいなのだ。(あくまで推測)グラフを用意してみたので、そちらの説明を・・・
赤っぽいのが、足首関節
青っぽいのが、膝関節
黄色っぽいのが、股関節
である。分かりやすいように
「赤、青、黄」の三原色で統一した。今回は屈伸だけなので、重心移動に必要な関節は除外している。
屈伸の時は、膝関節は、足首関節と股関節の二倍動かなければならない。
足首関節の動作量 + 股関節の動作量 = 膝関節の動作量
この場合、足首関節と股関節は1:1の関係でなければ、途中で倒れてしまう。
では、グラフではどうだろうか?グラフでは、
足首関節と
股関節は1:1の関係でないのが、よく分かる。
そんな訳で、この辺のプログラムの修正をして、動作実験を行ってみようと思います。結果はまた後ほど・・・
(2003/03/02/08:39分現在)
▼散々騒いだ結果。
またポカミスをやってしまいました。ジョイスティックの設定が初期化されていませんでした。足を前に出す方向Xが「0mm」ではなく「38mm」になってました。そりゃ、屈伸できないでしょ!もしやと思い調べて見て、案の定予想通りの結果に・・・むむむ。
また、別の部分の調査に行ってきます。...(lll-_-)
(2003/03/02/09:10分現在)
▼位置がずれるのは・・・
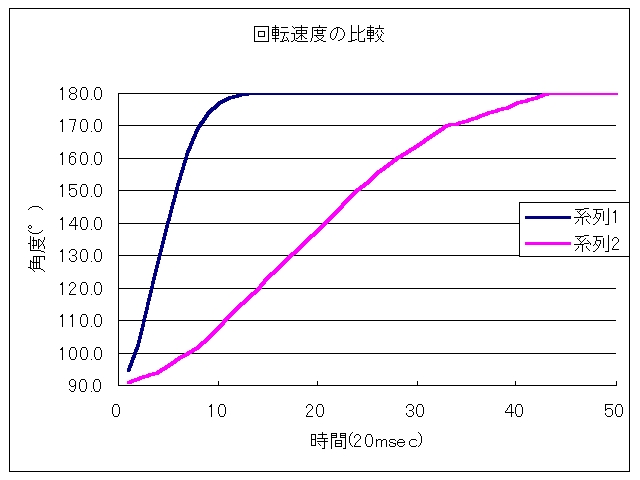
位置がずれるのは、RCサーボの回転速度を遅くする(ゆっくり回転)プログラムに問題があった。が、EXCELで計算しグラフを出した時にはきちんと目標角度まで到達できていたのだが・・・。この問題は保留にし、次に進む事にした。 現在は1歩踏み出す事に成功。二歩目までいければ歩行は成立すると、自分は考えている。今日中に何らかの映像を公開できると良いが、どうなることやら。(^-^;
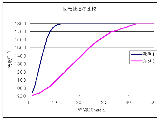
参考までに、回転速度を遅くした時のグラフを掲載する。青いのが通常出力される方で、ピンク色が回転速度を遅くした方です。これは実際に、どんな値が出ているのかを調べてみる必要がありそうです。
(2003/03/02/22:00分現在)
▼結局歩行完成ならず。
頑張ってみたものの、なかなかうまくいきません。一歩目は安定して足を出せますが、二歩目になると、かなり不安定な状態になっています。なんとか安定させないと、歩けそうにないですね。
というわけで、一応結果ということで、載せておきます。かなりギクシャクしてますが、一歩目は成功しています。二歩目は・・・見てのお楽しみということで。(^-^;
歩行失敗編[1.30mpg(MB)]
(2003/03/03/0:20分現在)
▼Wegweiser歩行す。
や・・・やりましたぁ〜。\(T▽T)/
1年1ヶ月にして、ようやく歩行ができました!!歩いた瞬間は最高です!ぎこちない歩きではあるものの、今まで、こんなに歩く事などできませんでした。
上半身はなぜないのかというと、ネジがはずれてしまったため、直すのが面倒なのでありません。>ぉぃ
この先は、いかにしてスムーズに歩行できるようにするかという感じでしょうか?あ、その前に上半身をつけた状態で歩かせなきゃ・・・(^−^;
歩行成功編(横)[1.30mpg(MB)]
歩行成功編(前)[1.30mpg(MB)]
▼タイロッドの限界

やっぱり、タイロッドは可動範囲狭いですね。歩行の動作を作っている時も、40°以上になると、途端に動きが悪くなります。というか、限界です。吉村さんに教えて頂いた方法を使えば、改善できると思いますが、それでもきつそう。特に起き上がりや、他の動作に支障をきたしそうな感じがします。ともかく、本格的な動作をやりだすならば、このタイロッドの配置も変えないと難しそうです。
▼股関節の保持力
股関節は計算通りにやると、保持できなくて少し下がってしまいますが、それは、I制御がないせいだと言われています。しかし、角度はずれますが、しっかりと保持はしてくれるので、足を上げるときは10°くらい補正してやることで、なんとか支えてもらっています。全RCサーボの電圧が6Vでも、結構いけるようですね。
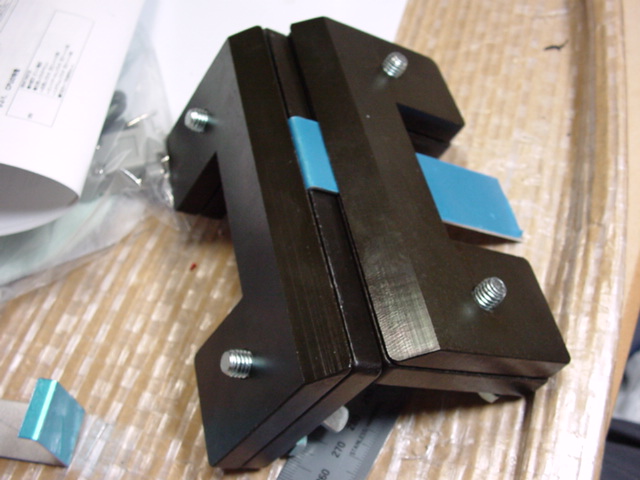
▼折り曲げ機到着


やってきましたぁ〜!折り曲げの季節です。>ぉぃ!違うだろ!
吉村さんから簡易折り曲げ機が今朝届いたんです。先日メールがあったんですが、まさか、次の日の朝に届くとは思いませんでした。しかも、自分はもうちょっと大きいと思っていたんですが、あまりの小ささにびっくり!
持ち運びにも便利ですねえ。某社製の折り曲げ機は重かったです。という訳で、試しに曲げてみることに・・・。とは言え、ケガキ針もないので、適当です。>ぉぃ!
実戦配備はまだです!まだ出撃させるわけには!!(ただ、設計図がゼロなだけ)改良パーツを3月中に作る予定なので、近々UPすると思います。
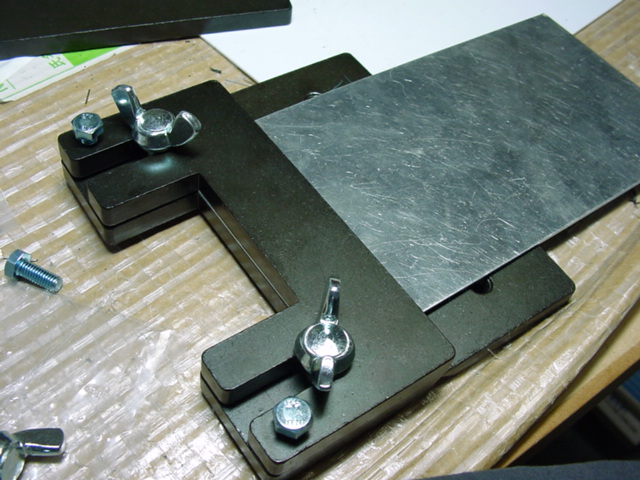
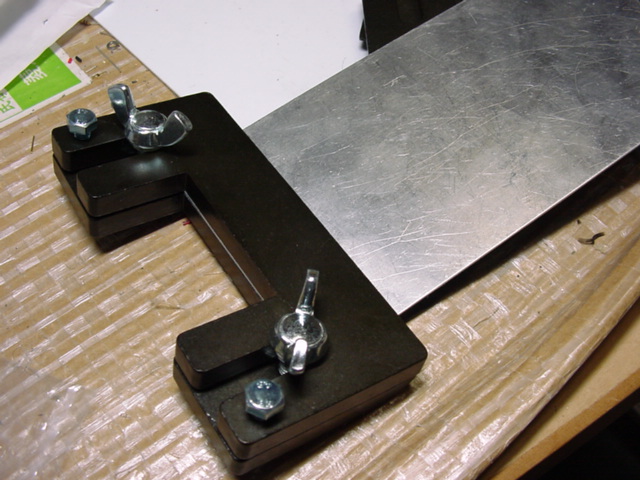
▼まずは、斬る・・いや、切る!


ヤッシロ メカトロ工作研究所にて、公開されている、【アルミ板の切断】を参考に、切断にチャレンジしてみました。(使い方、違いますね。)折り曲げ機がガイドになってくれるので、すんなり直線を引けます。あとは、クネクネしてれば自然に切れました。まぁ、厚さ1mmだから当然か。
今度切断するときは、設計図を印刷した紙を貼り付けてから、やってみよう。精度が出ないようなら、やめた方がいいかもしれない。
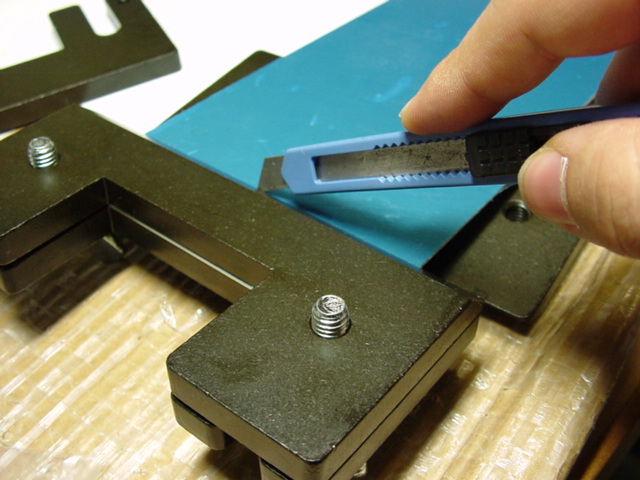
▼さぁ、折り曲げだ!


さぁ、これが正しい折り曲げ機の使い方!曲げてみます。
くにゃ♪
全く、力が要りませんね。しかも、曲げた後に三角定規で、90°なのかチェックできるのは嬉しい!これならば、かなり精度よく曲げられそうだ!
これならば、行ける!近々、折り曲げの実験をして、どのくらい伸び縮みするか、調べた方がよさそうだ。これで、正確な折り曲げが・・・3号機の折り曲げで泣いたので、今回はがんばっていきたいものである
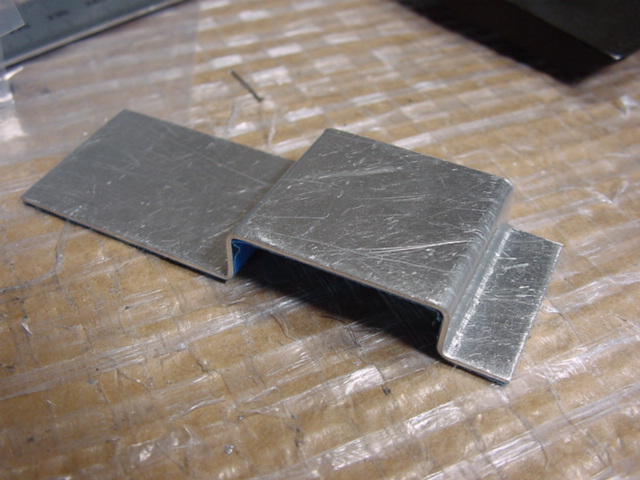
▼この曲げは何?


はい、また間違った工具の使い方をしています。>またかい!
先ほど、L字に曲げたアルミ材を左の用にセットし、折り曲げます。完全に固定されていない部分もありますので、曲げてる最中に、
先ほど曲げた部分が曲がり始めてしまうので、気合でねじ伏せます。>力技だなぁ
で、折り曲げを繰り返していくと、台のような物ができました。アングル材でも一緒に挟めば、多少はカバーできるかもしれない・・・しかし、このパーツなんかに使えるかなぁ・・・(^-^;
イトーレイネツ製簡易折り曲げ機特集 完
次回をお楽しみに!
▼動かないのは計算ミスの場合が多い
計算結果は正しいはずなのに、ロボットはちゃんと動いてくれない。なぜだろう?と、ずっと考えていましたが、分かりました。計算ミスと、視野が狭かった。この両方の理由のせいでした。
EXCELではちゃんと正しい結果が出ているのに、マイコンから出力される結果が違う。理由は、EXCELで使っている「ROUNDUP」という関数を、「四捨五入」と誤認していたためでした。「ROUNDUP」とは「切り捨て」なのです。そりゃ、合わない訳です。
で、早速修正し動作させるも、片足は正常な動きをするのに、もう一方はあらぬ方向へと動きます。これには参りました。かなりの時間、計算結果を照らし合わせてみましたが、問題なし。そこで、歩行中の角度ログを取り、EXCELでグラフ化してみました。すると、面白い事が!角度が増え続ける場合(0°+15°等)は問題ないのですが、角度が減る場合(180°−15°等)は値が変化しないのです。
今まで、計算結果のチェックは角度の増加する方しか見ていなかったので、気が付きませんでした。(グラフにすると、答えが出てきやすいですね。)で、問題だった計算式はこちら。
四捨五入の式:出力する角度 = ( 角度の増減 * 10 + 5 ) / 10
これだと、角度が増える場合。
( +15 * 10 + 5 ) / 10 = 15.5(int型だと、少数は切り捨てられるので、15)
となりますが、角度が減る場合。
( -15 * 10 + 5 ) / 10 = -14.5(int型だと、少数は切り捨てられるので、-14)
となり、求めたい結果と違ってしまいます。そんな訳で、カッコ内がマイナスの時は、「5」の部分に「-1」をかけてあげるように
変更したら、問題は全て解決しました。
そして、この問題が解決したおかげで、歩行の高速化、安定化が実現しました。
歩行安定編(横)[602mpg(KB)]
三歩目ができれば、歩行は完全なものになると思います。
▼ちょっと、挑戦!

歩行4歩[mpg(889KB)]

歩行4歩[mpg(920KB)]
今回は、皆さんからのリクエスト、上半身を付けて歩行をやってみました。で、結論ですが、調整に時間がかかりそうです。上半身を付けて気になった点
・腕をつけると、足首がちゃんと保持してくれない。
・左足の足首が前の方に倒れやすい。
腕は、重心が上がるような構成になっているため、合計の重心が、かなり上に行ってしまったと考えられます。改善点はただ一つ!怠けずに、新型腕パーツを作ることでしょう。大会前に、インフルエンザでダウンしたせいで、作れなかった、腕パーツを今こそ作るべし!(もうちょっと設計を良くした方がいいかもしれない。)
で、左足首が前の方に倒れそうになると保持してくれない点ですが、これは、右足首も同じでした。右足首は逆に後ろの方に倒れやすいです。RCサーボは両方とも配置が対称ですので、この結果からある方向への保持力が、一段と弱くなっていると考えられます。しかし、購入から1年経ち、様々な負荷に耐えてきたので、限界なのかもしれません。
▼結局、今日の成果は・・・
最終的には下半身での歩行作りに戻りましたが、あまり進んでいません。できたのは、三歩目と、最後の一歩です。三歩目ができた時点で、永遠に歩く事が可能です。(二歩目と三歩目を繰り返せばいい。)しかし、止まる事はできませんでした。そこで、最後の一歩を作り、歩行は完成したと言えるわけです。
後に様々な状況下で止まる事等を考えると、もう一つ必要ですね。今後の予定(やろうと考えていること)をまとめてみよう。う〜ん、どうなってるんだ?
モーション製作
・最後の一歩。
・歩幅の変更をしても、歩行に支障がないかのテスト。
・歩幅変更に問題が無ければ、ジョイスティックで歩行速度をコントロール。
・後ろ歩き。
・横歩き。
・全方向を、ジョイスティックでコントロール。
・片足立ち
・その場で旋回
・歩行しながら曲がる。
・屈伸(まだ、ちゃんとした物がないので)
・球けり(ちょっと転がればOK)
・球けり強(強い球けり)
・うつ伏せ起き上がり(できるかどうかのテスト)
・仰向け起き上がり(できるかどうかのテスト)
・キック>ぉぃ
・膝蹴り>ぉぃ!
・体当たり>おい!!
足だけでもいろいろ表現がありそうだ。上のいくつが実現可能なのだろう。とりあえず、増やすだけ増やしてみよう。(^-^;
[BACK]
[TOP]
[NEXT]
Copyright (C) 2003 U-hirohito All rights reserved.