▼賀正新年





ここを見ておられる皆様、明けましておめでとうございます。今年も頑張って二足歩行可能なロボットを作っていこうと思っていますので、
よろしくお願いします。
←最初に試作開発された塩ビ板製のWegweiser
現在もあまり作業ができる状態ではないですが、とりあえず配線作業をやりました。で、RCサーボの(ギア側)を空けてみると、折れてる部分が!?どうやら、180°以上動かないようにする部分が、過負荷で壊れた模様。
とりあえず、
見なかったことにして戻しました。>ぉぃ
主に配線の付け替えですね。全部で5本です。「信号線一本、電源用の線が各二本」電源は二本の線(6V,GND)で各RCサーボを経由して、足首まで供給するので、解体した場合はサツマイモみたいな感じになります。(笑)配線作業は時間がかかるし、結構大変ですね。
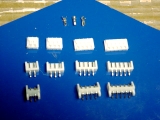
そして今回も、お世話になる日本圧着端子製のEHコネクタを、信号線と電源用に取り付けて完了です。配線に端子を圧着する作業は大変ですが、やっていくうちに少しずつ上達している感じがします。接触不良がおきてなければいいけど・・・(^-^;
タイロッド用にOリングも買ってきました。これでタイロッドのガタつきも多少軽減されます。これを取り付けるのと取り付けないとでは、大きな差がでます。あとは実際に動かしてみないと分からないですね。(+_+)
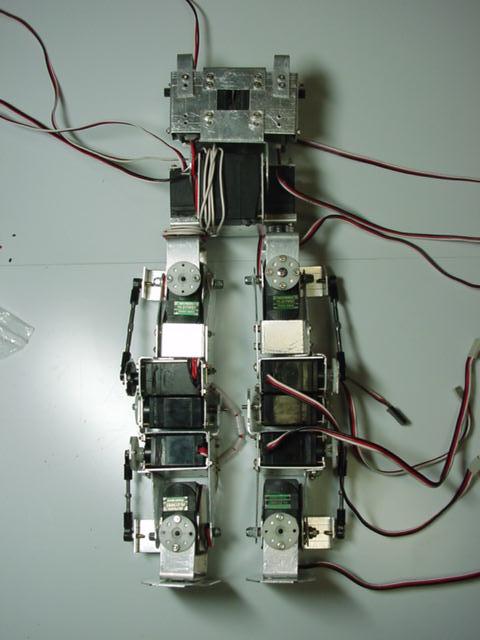
片側だけ完成したので、記念撮影を・・・配線したのは右足の方です。大分すっきりしました。今日一日でなんとか両足の配線を終了することができたので、稼動テストをやってみようかと・・・立たせられれば、OKなんですがうまくいくのやら・・・(あくまで接触不良等のテストです。たぶん)
とまぁ、こんな状況ですかね。結局時間がないんですよね。ロボットに時間が割けない。結局、第二回と同じような感じになります。あの時は2週間。今回は1週間。最後まで足掻くしかない。うん(--)(__)
第三回ROBO-ONE開始まで、あと21日
▼気が変わりやすい性格か?
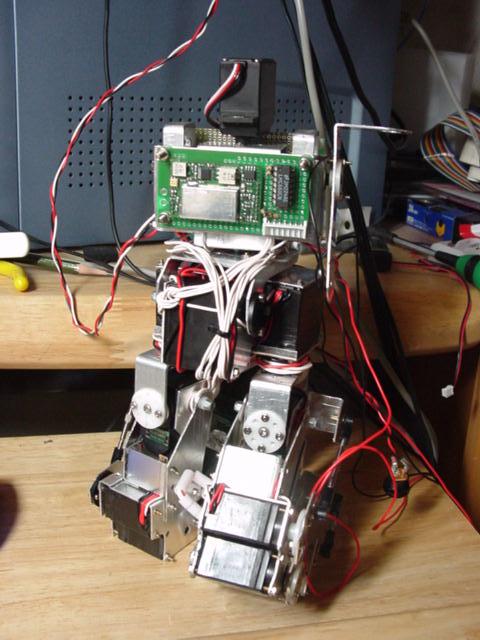
当初はこのまま、マザーボードの配線をして動かそうと考えていましたが、どうせ後で
やることになるので、先にやってしまおうと思い、胴体部分の配線をやっちゃいました。
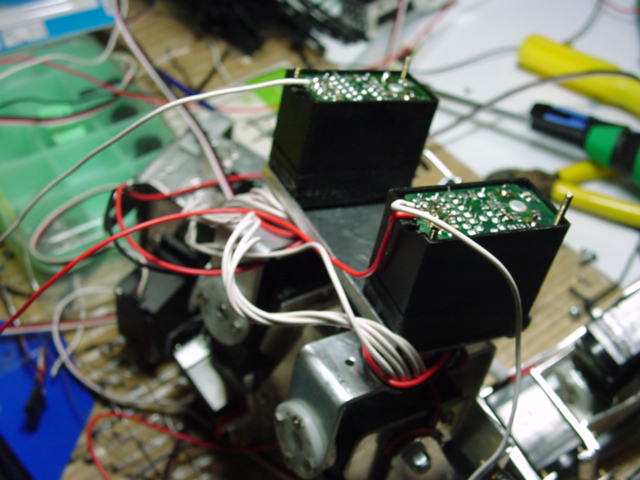
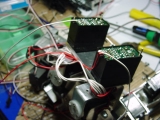
写真に写っているのは、ちょうど腰の部分です。
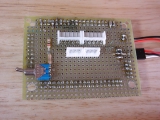
▼配線、配線、あぁ、いくつめのマザーボードだ?
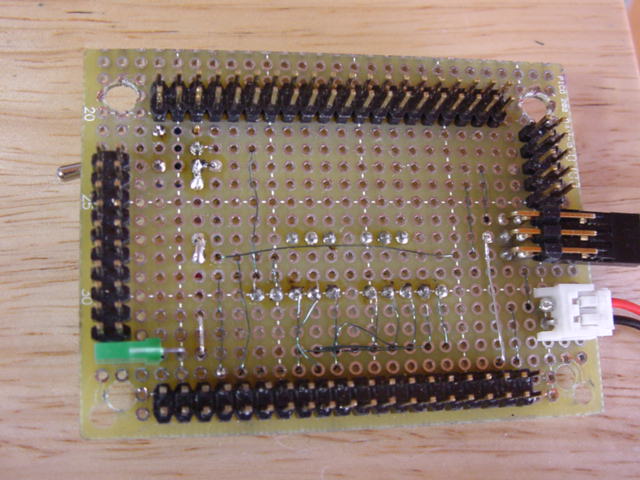
各部の配線を経て、マザーボードの配線へ。
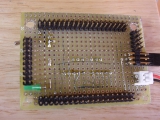
このマザーボードには以下の機能があります。
- シリアル通信用のピンヘッダ(3PIN)
- 主電源用コネクタ(2PIN)
- 電源用LED
- RCサーボ用信号コネクタ(16PIN「腕部、頭部を除く」)
- AKI-H8/3052F用ピンヘッダ
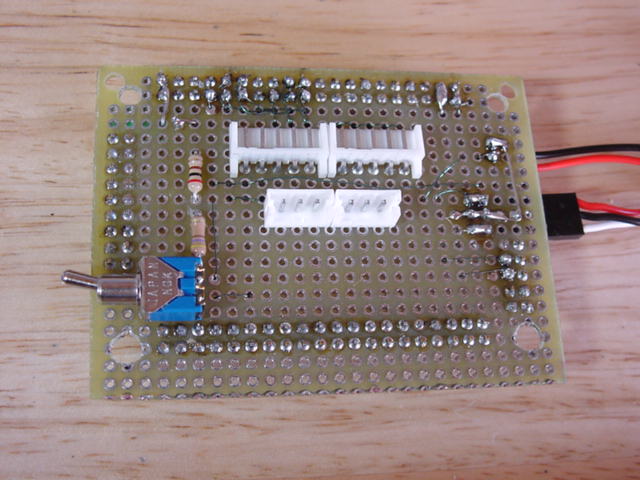
この時、自分はボケてまして、RCサーボに供給する電源(GND)をこの基板に接続するのを忘れていたので、
後に2PINコネクタを増設しました。(GND)を接続してないので、RCサーボが変な動きをしていました。(^-^;
▼RCサーボ点火!!

気を取り直してもう一度、RCサーボに火を入れました。まだ、誤差の修正をしていないので、多少のずれはあるものの、
納得の行く状態。「ん?、一個だけRCサーボが
動いてない!?」
「なんですとぉ〜Σ( ̄▽ ̄;;)」というわけで、RCサーボは半田付け時に怪しい部分もあったので、分解、分解!!
「あぁ、せっかく組み立てたのに・・・」。で、
結果は問題ナシ!とりあえず、証拠写真を取って、お終い。
戻しました。
次の問題点として考えられるのが、
コネクタの接触不良!これも、コネクタの端子を取り出して、
取替えました。で、動かした結果、RCサーボ動いてくれました。端子のかしめ方が甘かったか。
汎用かしめ工具の購入を考える。とりあえず、買うとしてももうちょい先。(笑)
▼まずは、シリアル通信!
今までは非常に面倒な誤差の修正をしていました。「誤差修正したものを動かして、修正して・・・以下略」
今回は、キーボードを打って修正したかったので、とりあえずプログラムを書いてテスト、テスト、テスト!が、ダメでした。
ずっと悩んでいましたが、やっぱりダメ。今までシリアル通信でできたのは、H8から数値や文章を送る事だけ。
パソコンから意図した物を送信することはできませんでした。
ここで、救われたのが力弥さんの
TekuRobo工作室
!![ソフトウェア編⇒好きな関節を好きなだけ動かす]ここに、自分の求める答えが載ってました。
おかげで、なんとかソフトも満足の行くものになりました。できたときは、やっぱり嬉しかったですね。はい。
▼H8よりの通信途絶!RCサーボ動きません!!
誤差修正後、とりあえず屈伸をさせようと、簡単な動作プログラムを作成し、モニター上で走らせる。
「うんうん、いい感じに動いて・・・なっ・・・」順調に動いていたサーボが突然、力が抜けたような状態に!
思考錯誤えプログラムをいじるがやっぱりダメ。「やはり、DMACを使ったプログラムは無茶だったか・・・」などと途方に暮れていました。
結局原因不明で、時間だけが過ぎていった。
▼原因は意外なところに!?
この力の抜ける現象、この解決の鍵を握るのはRCサーボでした。
試しに、一つだけRCサーボに信号を変化させないプログラムを作ったところ、
他のRCサーボは全く問題なく動作しました。
最初は「RCサーボの個数に関係するのか?」と考えていましたが、信号を変化させないRCサーボを別のものにして、
実験すると、また力が抜けてしまいました。どうやら、このRCサーボが問題だったようです。
この動作プログラム、20msecで1°動かすプログラムなんですよ。これを、20msecで2°
動かすプログラムに変えたら、問題なく動きました。
あくまでいい加減な推測ですが、このRCサーボを制御している基板に何か異常があり、
細かい制御ができなくて、それがマイコンに影響を与えてしまい、動かなくなってしまった。
うーん、書いていてもよくわかりません。(^-^;
▼ついにやってきた最後の1週間

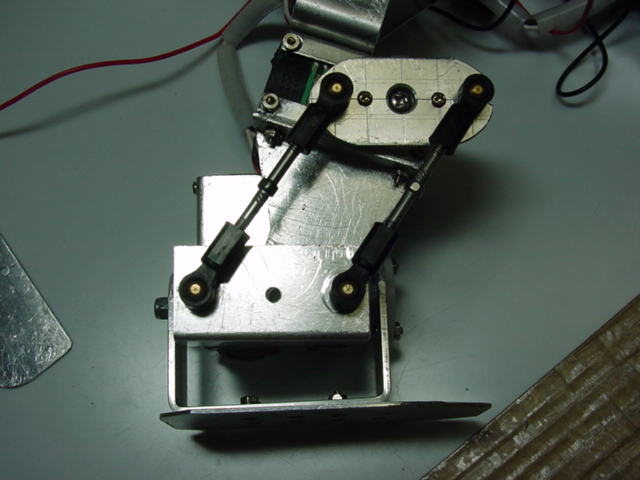
ようやく、ロボットの方をやる時間ができました。なんとしても、歩行だけはさせたい現在のタイロッドが一本の状態だと、遊びが多すぎてまともに足を曲げられません。そこで、タイロッドをもう一本付けられるパーツを作ります。時間が無いので、デザインは無視状態です。前回のパーツよりも大きくなったので、頑丈にもなりました。合計4個製作。
▼サーボホーン側も二本付けられるように

サーボホーン側も忘れちゃいけません。簡単なパーツなので、すぐ完成します。ただ、ヤスリで角を丸くする作業は疲れます。( -_-)
▼仮組みにて・・・
やってしまいました。設計ミスです。先ほど製作した「コの字型」のパーツの寸法が間違っていました。タイロッドを取り付ける穴の間隔が20mmなのに対し、サーボホーン側のパーツはタイロッドの取り付ける穴の間隔が30mmです。10mm足りません!!4個作った後に気づいたのは痛かった・・・仕方なく「コの字型」の方を作り直し。(涙)
▼失敗はいつもの事

一応、試作は既に終わっていたので、穴の位置も一部変えるだけで良いので、スムーズに行きました。さて、このパーツが今後のWegweiserの運命を握っている。
▼仮組み

先ほどのパーツを組み合わせると、こんな感じになります。この平行四辺形の形が重要なんですね。最初に作ったパーツをつけると、台形になってしまいます。狙い通り、遊び(ガタ)は消えました。まだ片足のみなので、なんともいえませんが、行けそうな感じです。ロッドのパーツが足りないので、明日買出しに行かねば・・・
▼足裏II


そして、今回もう一つ作ったものがあります。コレ(足裏)です。好きな位置に固定できるように、無数の穴が空いています。結構大変でした。さらに、あんまり精度良くないし。とりあえず、取り付けられればなんでもありです。>ぉぃ
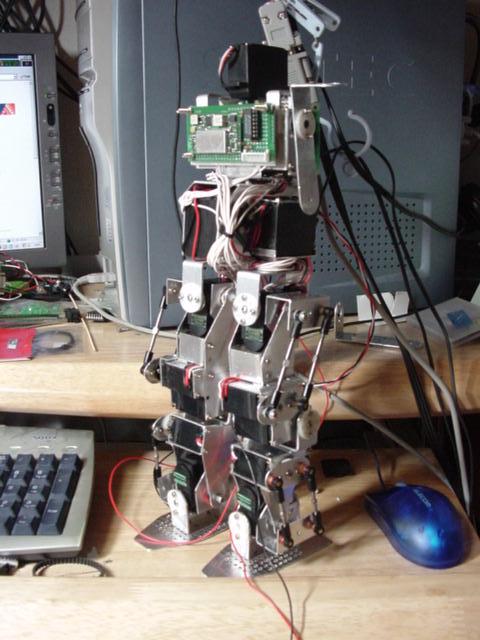
←結局、先週から変わってないんですよね。本当は腕も作りたかったんですが、もう一度形を検討しようかなと思っています。設計ができ次第、製作に入るつもりです。とりあえず、明日は順調に行けば屈伸くらいはできるようになっていると思います。
無線機のテストも終わってないし、充電池のテストもできてな〜い。秋月で買ってきたタブつきニッケル水素電池を買ってきて半田付けしようとしたけど、半田が乗ってくれない。フラックスつけてもダメ。さて、どうすれば充電池パックはできるのだろう。
第三回ROBO-ONE開始まで、あと8日
▼とりあえず、起動してみる。

前回、タイロッドを増設したので、動かしてみました。結果はバッチリです。遊びもほとんどなく、これでようやく動作をつけることができます。で、いつも通り最初に屈伸からやってみました。
▼屈伸
動作はどのようにつけようか考えたのですが、前回と同じように、計算でやらずに数値で直接動かすことにしました。そして、できたのが左の屈伸動画です。前回はマイコンを上半身につけた場合、屈伸するのにも苦労しましたが、今回は難なくこなしています。やっと、再設計の効果が現れてきたか!?
屈伸[mpg(986KB)]
とりあえず、前回できた屈伸と、横揺れ程度ならば余裕でできそうです。さぁ、前回は一応一歩だけ踏み出す事ができましたが(下半身のみの状態)今回は歩行できるんですかねぇ?(他人事>ぉぃ)
今日も結局無線のテストと、電池のテストできず!!充電池は「こんな半田付けで良いのか!?」というような半田付けやってます。明日くらいに公開する予定です。いよいよ、時間がなくなってきた。
第三回ROBO-ONE開始まで、あと5日
▼信号線を増やし、動作!
今までは、片足5自由度分しか動かせなかったので、腰と胴体の信号線を増やしました。+6自由度!これで、腕がつけば全部動かすことができるはずです。
▼異常事態発生す
RCサーボはすべて初期位置がめちゃくちゃなので、位置あわせを行います。新たに追加したRCサーボすべての位置を合わせます。さぁ、動作、動作!歩行動作の製作中なので、動作する量などを変えているわけですが、ここでトラブル発生!!なんと、問題のないはずのプログラムなのに、突然左腰が怪しい動きをし始めました。
「おぃおぃ、そんな指示出してないよぉ」左足が、起動と同時に右方向に遅いスピードで回転を始めます。そこで、前回の異常のなかったプログラムを入れても、やっぱり結果は右方向へ回転でした。悩みながらも夕飯の時間なので、退室。
異常事態[665mpg(KB)]
▼事件は迷宮入りに(早っ)
帰ってきて、もう一度異常のないプログラムを入れたところ、問題なく、動作!(左足が回転しない) RCサーボに原因があるんですかね・・・う〜む。とりあえず、分かった事は時間を置くと動く事。じゃぁ、冷却すればOKなのか!?
↑かなり、混乱中であります。(21:40現在)
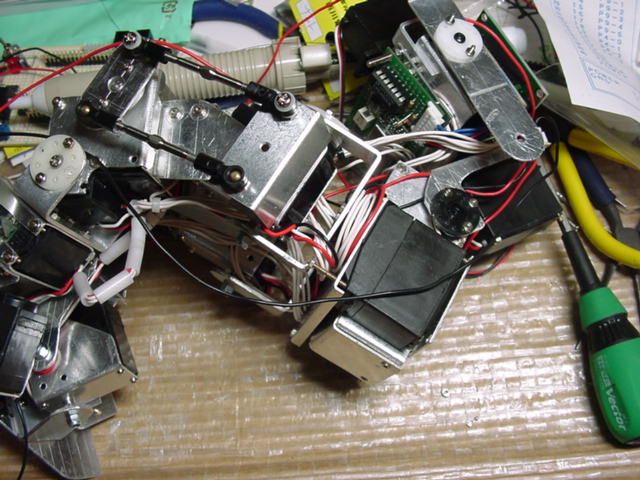
▼分解作業・・・始め!

このままでは解決へ向わないので、RCサーボに問題があると仮定し、RCサーボの交換を行う事に。そんなわけで、まだ作っていない腕パーツ用のRCサーボを引っ張ってくる。足以外は全て、安いS3003なので、代用が効くのだ!(^-^)
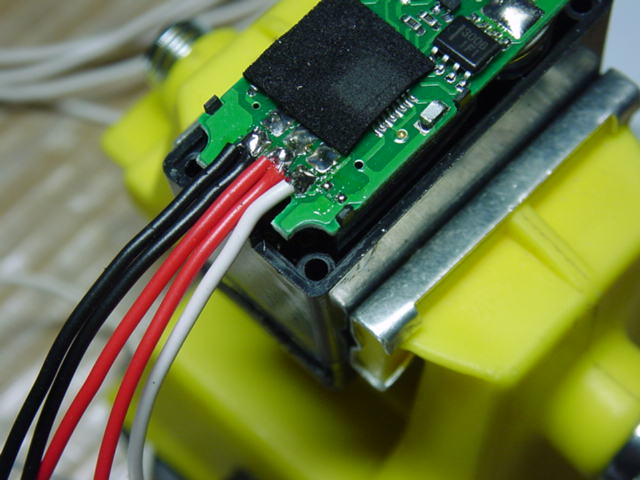
▼RCサーボ交換

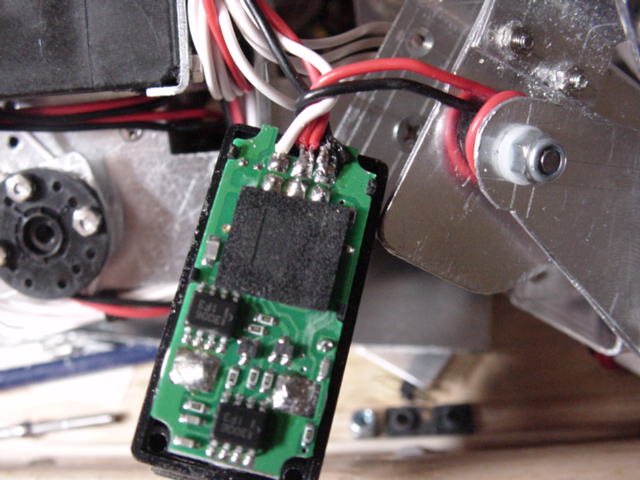
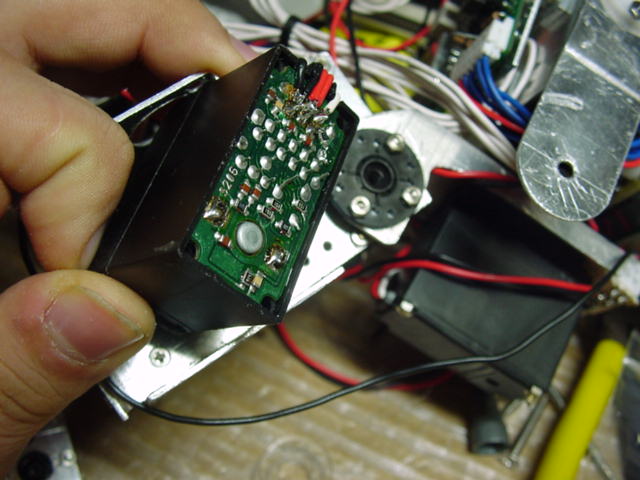
今手に持っているのが、今まで左腰に使っていた問題と思われるRCサーボ。ケースを加工するのは面倒なので、ケースとギア以外全て取る!(要するに、基板+モータ+ポテンショメータ)
そして、配線を交換したRCサーボに付けて出来上がり!そんなに時間がかからなかった。で、動作させたところ、どのプログラムを入れても、左腰は問題なく動作!問題の根源はRCサーボの基板(?)にあったようである。これで、動作の作業に戻れる。
(22:54現在)
[BACK]
[TOP]
[NEXT]
Copyright (C) 2003 U-hirohito All rights reserved.




 ここを見ておられる皆様、明けましておめでとうございます。今年も頑張って二足歩行可能なロボットを作っていこうと思っていますので、
よろしくお願いします。
ここを見ておられる皆様、明けましておめでとうございます。今年も頑張って二足歩行可能なロボットを作っていこうと思っていますので、
よろしくお願いします。