▼賀正新年




 ここを見ておられる皆様、明けましておめでとうございます。今年も頑張って二足歩行可能なロボットを作っていこうと思っていますので、
よろしくお願いします。
ここを見ておられる皆様、明けましておめでとうございます。今年も頑張って二足歩行可能なロボットを作っていこうと思っていますので、
よろしくお願いします。←最初に試作開発された塩ビ板製のWegweiser
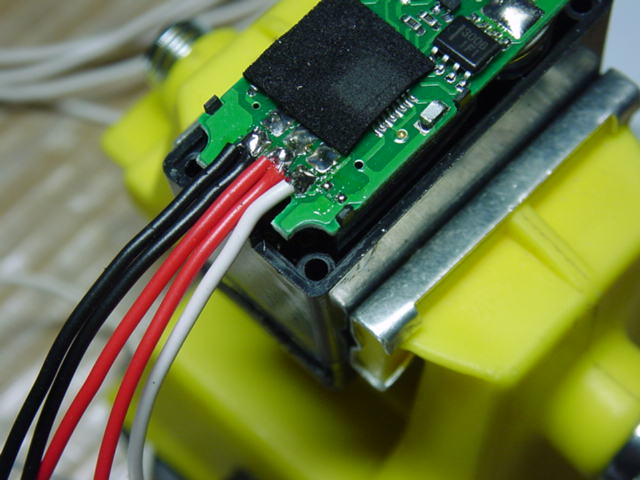
現在もあまり作業ができる状態ではないですが、とりあえず配線作業をやりました。で、RCサーボの(ギア側)を空けてみると、折れてる部分が!?どうやら、180°以上動かないようにする部分が、過負荷で壊れた模様。
とりあえず、見なかったことにして戻しました。>ぉぃ
主に配線の付け替えですね。全部で5本です。「信号線一本、電源用の線が各二本」電源は二本の線(6V,GND)で各RCサーボを経由して、足首まで供給するので、解体した場合はサツマイモみたいな感じになります。(笑)配線作業は時間がかかるし、結構大変ですね。
そして今回も、お世話になる日本圧着端子製のEHコネクタを、信号線と電源用に取り付けて完了です。配線に端子を圧着する作業は大変ですが、やっていくうちに少しずつ上達している感じがします。接触不良がおきてなければいいけど・・・(^-^;
タイロッド用にOリングも買ってきました。これでタイロッドのガタつきも多少軽減されます。これを取り付けるのと取り付けないとでは、大きな差がでます。あとは実際に動かしてみないと分からないですね。(+_+)
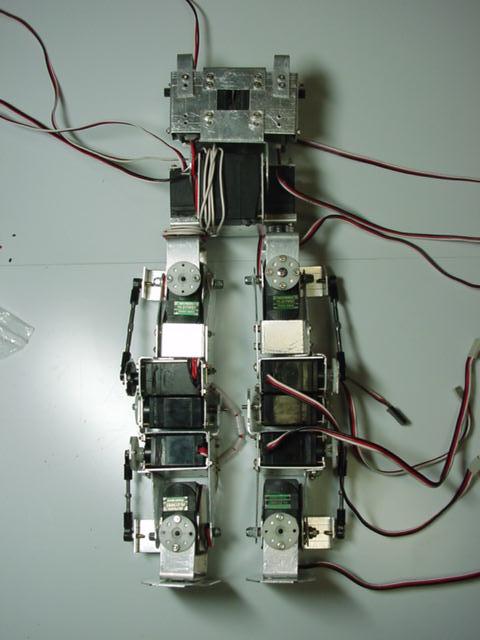
片側だけ完成したので、記念撮影を・・・配線したのは右足の方です。大分すっきりしました。今日一日でなんとか両足の配線を終了することができたので、稼動テストをやってみようかと・・・立たせられれば、OKなんですがうまくいくのやら・・・(あくまで接触不良等のテストです。たぶん)
とまぁ、こんな状況ですかね。結局時間がないんですよね。ロボットに時間が割けない。結局、第二回と同じような感じになります。あの時は2週間。今回は1週間。最後まで足掻くしかない。うん(--)(__)
第三回ROBO-ONE開始まで、あと21日
