▼S3003分解



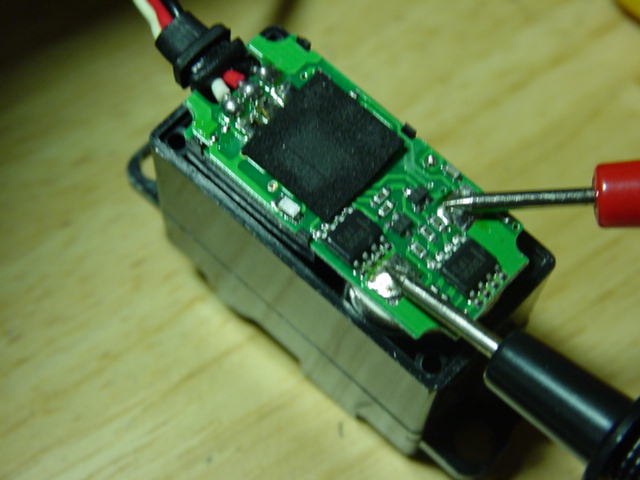
双葉のS3003の中身を分解してみました。基板に使われているICは良く分かりませんが、そんなに複雑な回路じゃなさそうです。
S3003に使用されているマブチモーターのRF-020THです。データシートによると、定格電圧は4.5Vなのですが、実際にモーターにかけている電圧は、4.8Vや6.0Vなので、モーターに優しくないのかなと思ったりしています。(実際はどうなのでしょうか?)
マブチモーター株式会社
▼マウスと参号機
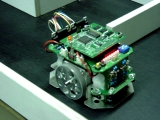


二足とは関係ないですが、うちのサークルで動かした東日本支部標準マウス。ホコリかぶっていたマウス用迷路の上で元気よく走りました。(ただし、直進のみです)
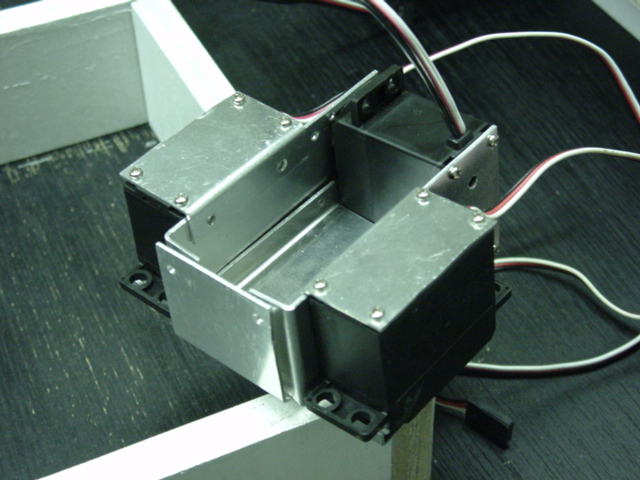
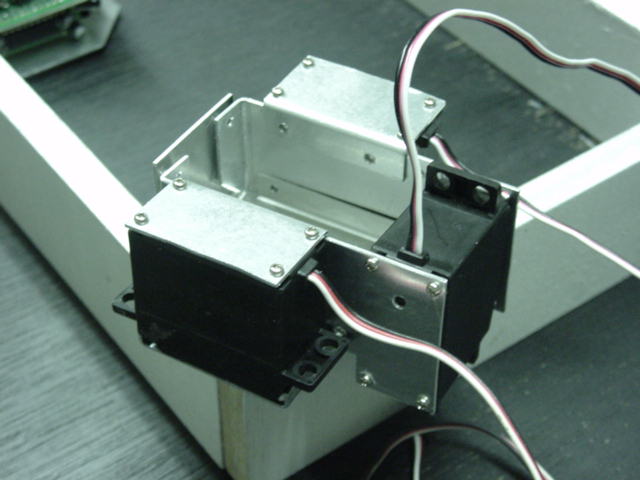
はい、久々にHP上で載せる二足画像です。二足の腰部分です。折り曲げと穴あけ精度が、それほどよくないので、
怪しい部分もあるんですが、まぁなんとかなるかなと・・・(^-^;
ネジやナットはついていないので簡単に分解できます。
「置いた直後、マウスに突っ込まれて大破(笑)」
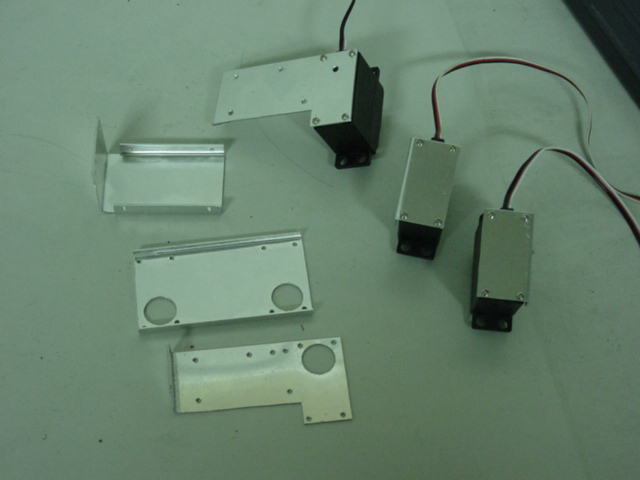
腰は全6パーツで構成されています。分解したらこんな感じです。これらの加工を終えて、「折り曲げ加工に今後苦しまされるであろう」と予感しました。(いくつかボツになった物もあります)
▼剛性問題解決策


先月行われたROBO-ONE Technical Conferrenceにて、
「腰の付け根などのサーボホーンに、剛性がないといけない。」と言われました。4月頃に製作された機体もこの辺の剛性が欠けていたので、片足立ちすらできませんでした。
その解決策として
ボールベアリングか、ナイロン製のものを付け根に挟むことで剛性を上げることができるらしいのですが、ボールベアリングは高いので見送りました。
その代用品が左のポリ製のM8ワッシャーです。これをサーボホーンの付け根に入れることで、剛性が上げられるカナと・・・しかも、「安い!加工が不要!」ということなので有効かと。寸法は、穴径が8mm、厚さが1.5mmくらい。サーボホーンの付け根が8mmなのでぴったり。
西川電子部品株式会社(ネジ部)
ラジオモール
▼胴体パーツ



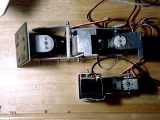
今回は胴体部分のパーツを製作しました。左の写真に写っているパーツは、胴体とAKI-H8/3052Fボードを接続するものです。皿加工してある部分に、M3の皿ネジが差し込まれ、スペーサーをマザーボードの間に挟み連結します。悲しい事に、このパーツの
折り曲げに4回ほど失敗しました。(泣)
さて、右側の写真に写っているのは、腰の部分にあるRCサーボと、胴体を連結するパーツです。ちゃんとサーボホーン用の穴を開けてあります。こちらの折り曲げは問題なくできました。
胴体パーツの配置はこんな感じです。あと4パーツほど作らないと胴体が完成しないので、分かりにくいと思いますが、他の部分に比べてパーツ数は少ない方なので、直に形になるでしょう。
く足パーツを作らなきゃ・・・(^-^;しかし、最近は忙しくて全く製作に時間を回せない。このままでは前回と同じになりそう。気合を入れなおさねば・・・( -_-)
▼PS-2174FET分解

前回のS3003に引き続き、今度はPDS-2174FETです。モーターに番号等が記載されていなかったので分からなかったのですが、
大きさ等からA17 seriesの直流コアレスモーターA17B-07-S〜A17B-17-Sであることが推測できます。
ココまではよいのですが、問題はこの先で、どのモーターか?ということです。そこで、データシートに記載されている「端子間抵抗」を元に、テスターで直接測った所、抵抗値は2.0Ω〜2.1Ωを行ったりきたりでした。しかも、両方ともデータシートに記載されているので、A17B-08SとA17B-16-SのどちらがRCサーボに使用されているのかは分かりませんでした。
で、これまで調べたRCサーボ(と言っても二個!)は全て印加電圧は4.5Vで、我々はそれ以上の電圧をかけて動かしているということでした。でも今のところ問題はないし、大丈夫なのかな?(^-^;
シーアイ化成 *C.I.KASEICO.,LTD*
シーアイ化成 MICRO DC MOTOR
▼仮組み


前回足りなかったパーツを二つほど追加して、胴体を仮組みをしてみました。確かに小さい!設計通り!・・・なのですが、組み立てがとても大変なんです。この問題は次回に先送り。組み立てられるところまで組み立てます。
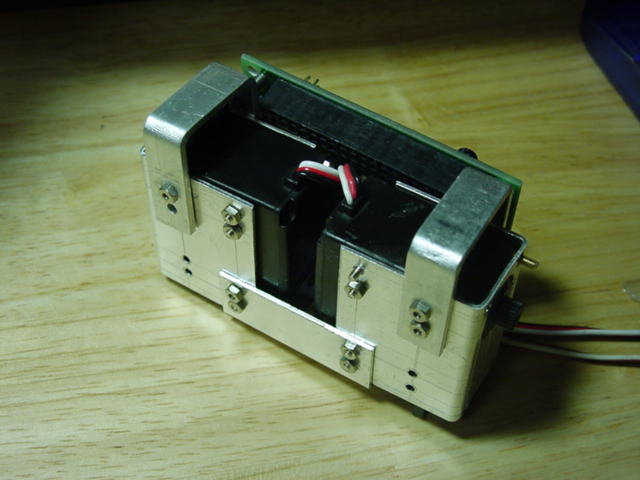
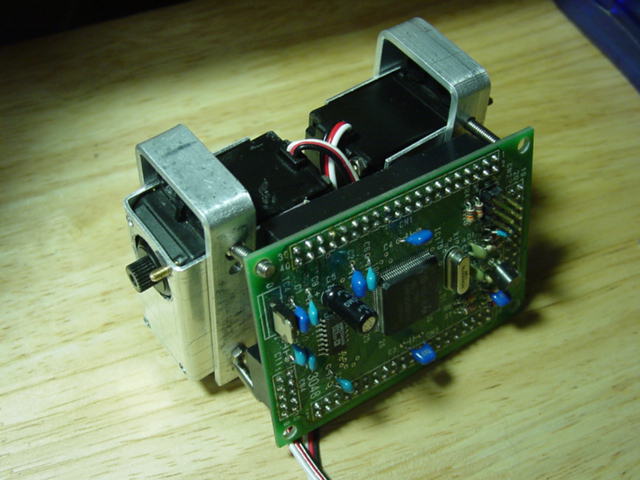
左の写真は胴体正面より撮影、右の写真は胴体の背後から撮影しました。まだマザーボードも作ってないので、AKI-H8は立てかけてあるだけ。(^-^;大きさの比較にもちょうどよいかもしれません。(あんな感じに搭載される予定)ともかく作業の進行が遅い!年内に全身を完成させたいものである。
▼付録のCPLD

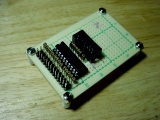
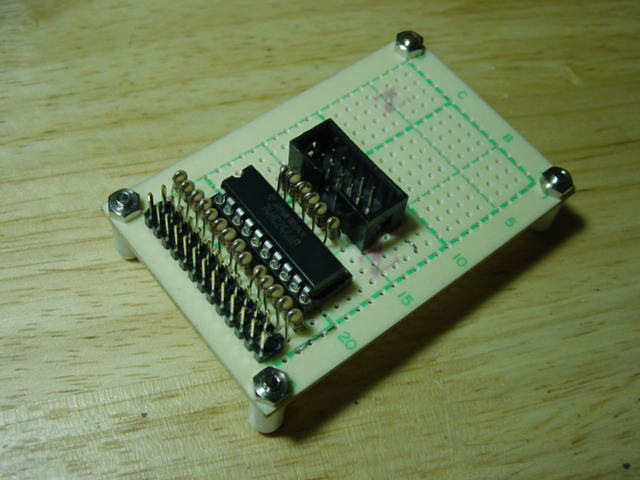
さて、こちらは2003年1月号のDesignWaveMagazineの付録として付いてきた、アルテラ製のCPLD(ピッチ変更基板に実装済み!)です。値段的にお得だったのと、前々からやってみたいと思っていたので、入手しました。(4件目の本屋でゲット)
とりあえず、これだけでは何も出来ないので、データをダウンロードするための、ダウンロードケーブルだけ自作しました。
いつも自分が作ると、一発で動作することがないので、今回も一発で動かないかもしれません。とりあえず、ROBO-ONEが終わるまでは、CPLDをいじれそうにありません。
DesignWaveMagazine
CQ出版社
▼微弱無線機
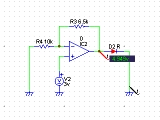
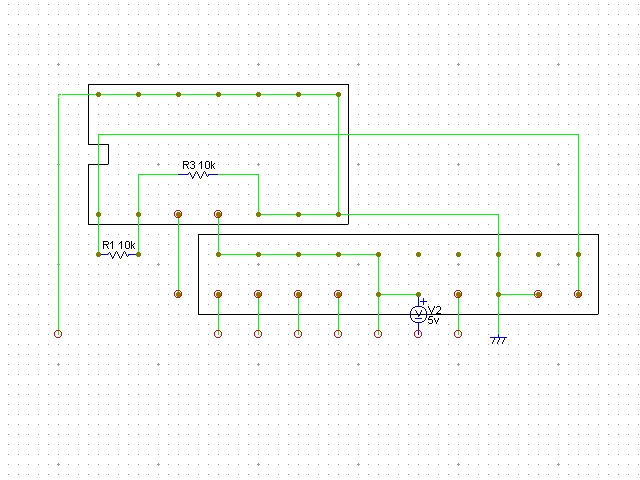
とりあえず、野村エンジニアリング製の無線機の出力する電圧が3Vなので、これを昇圧しなければならない。
そんなわけで、オペアンプを使った回路。抵抗が二本で済むシンプルな回路だ。
無線機モジュールをなるだけ小さく収めたいので、14ピンDIPソケットの底にも抵抗を潜らせる予定。
コネクタを何にするか悩み所である。自分としてはなるべく壊れにくいコネクタを使いたい。
日本圧着端子製はコードがいつも外れるので好きになれない。やり方が悪いのだろうが、作り方を教えてくれる人などいない。
▼新着パーツ情報





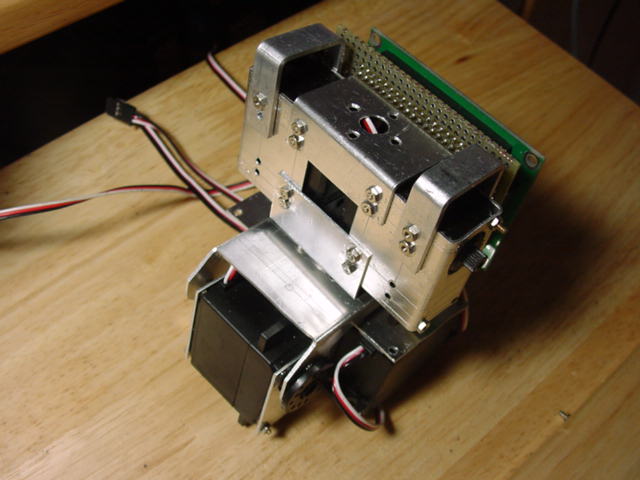
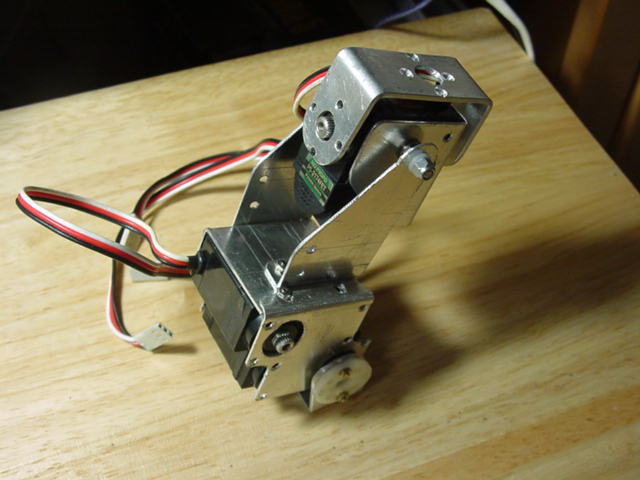
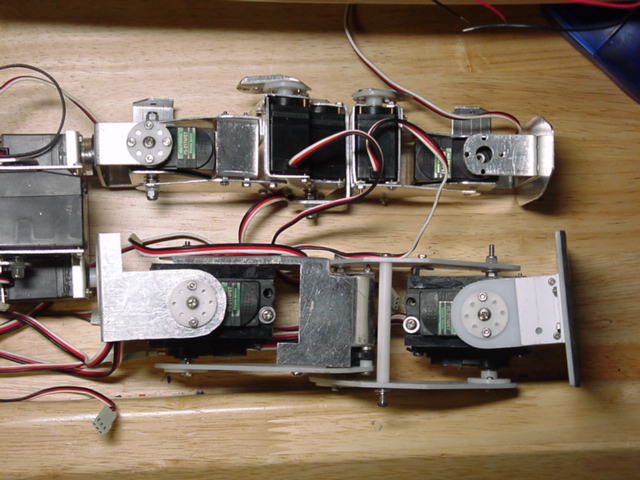
今回はがんばりました。ということで、各写真の説明をしていきます。まずは、上半身と腰!ようやく完成しました。
仮組みではあるけれど、強度もそれなりにあります。(今までのが弱すぎただけかも・・・)
目指せ!低重心、小型歩行ロボ!(比較対象、今までのWegweiser)
ご覧の通りに上半身は回転できます。この回転するRCサーボには、前に紹介した、M8のポリワッシャーを二枚ほど挟んでいます。
そのおかげで、剛性がかなり向上しています。
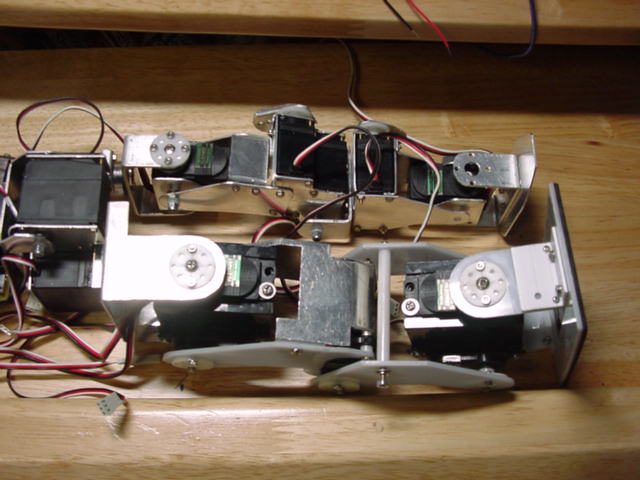
背面のAKI-H8/3052Fはきちんと固定してありますが、まだ両面スルーホール基板にはピンヘッダを半田付けしてあるだけで、
他は何も配線されていません。近々、コネクタや電源関連を実装するつもりです。
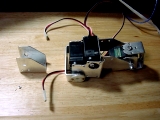
今回作ったのは胴体部分のパーツだけではありません。足パーツも作りました。一応飾りとして、足と腰の部分を接続するパーツが、ついていますが、これは設計ミスにより、装着できません。
つまり、作り直しです。(泣)あの丸い部分は時間かかったのに・・・
(最終的にはペンチで荒く切断して、ヤスリがけしたので、早く作れましたが・・・)
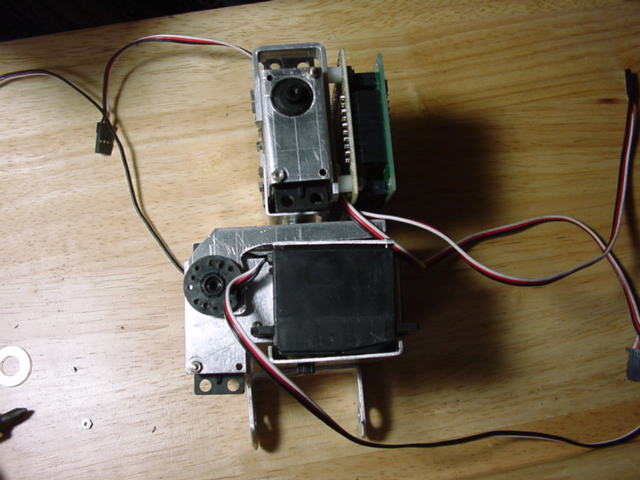
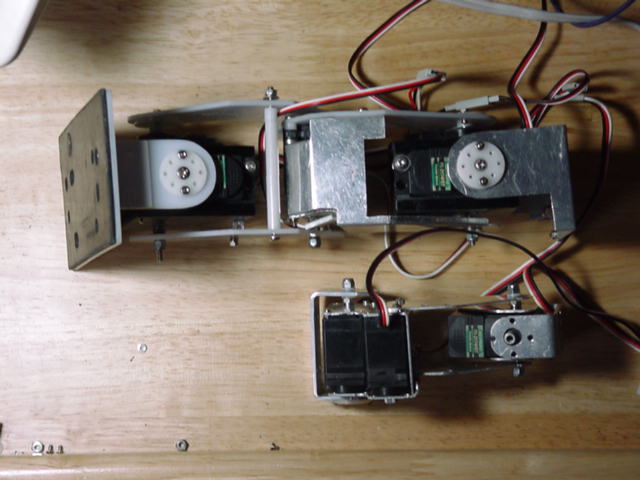
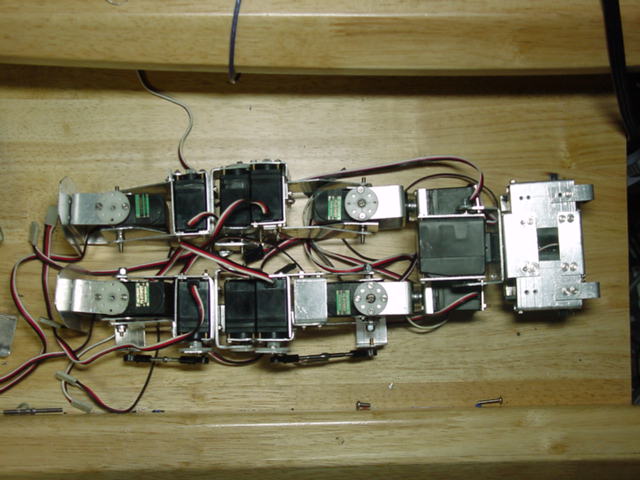
前回の足との比較。前回の足がいかに大きく、今回の足がいかに小さいか、がよく分かると思います。前回のはRCサーボ無改造で製作しようとしたために、余分なスペースなどができてしまい、結果的に大きなものになってしまいました。
今回の足はタイロッドというラジコンカーに使われる部品を使うつもりです。自分にとっては未知の部品なので、うまくいくか
心配です。しかし、足がこれだけ小さいと、なんだか歩けそうな気がしてしまいます。(笑)
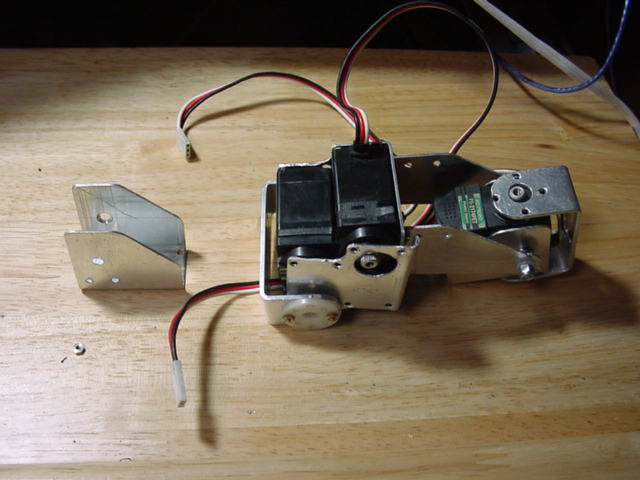
今回作った足の全パーツです。本当は両方の足を作るつもりでいたのですが、なかなか作業が進まず片足だけでも完成させよう
としましたが、結局は半分(片足)しか作れませんでした。
ケガキ、穴あけ、切断、折り曲げの順番でやっております。う〜ん、きびしい!年内には、完成させたいもの。
正月はWegweiserと迎えたいなぁ・・・(  ̄▽ ̄)
▼足の状態を公開



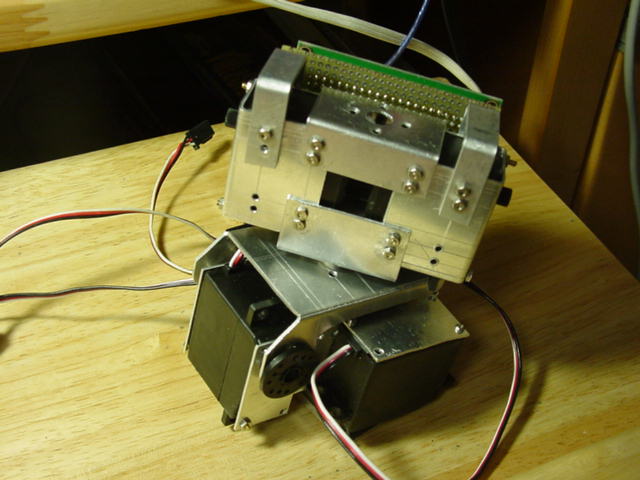
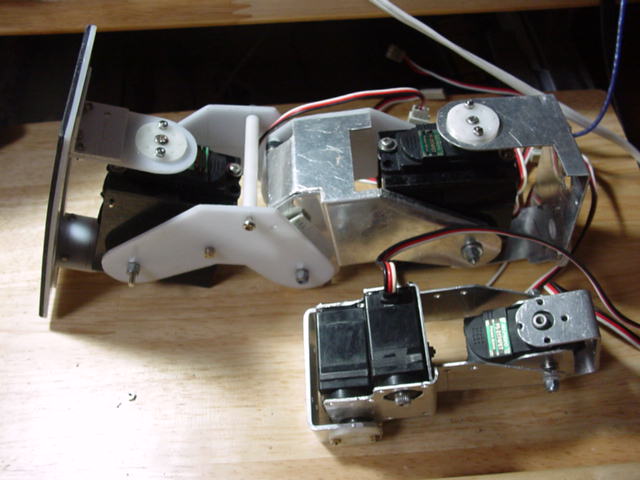
とりあえず、片足が完成したので大きさ比較。一見同じくらいの高さに見えますが、実は手前の大きい足は「ぐにゃ」と潰れた状態なので、低く見えるだけです。全体的にほっそりしたおかげで、足が長く見えます。
タイロッドを取り付けてみて、予想外の事態が!!?ある一定の角度になると、タイロッドが伸びた状態になってしまい、コントロール不能になってしまうのです。う〜ん困った。今回は起き上がりまで行きたかったが、雲行きが怪しくなってきてしまった。(写真のような深い屈伸はできないということ。)
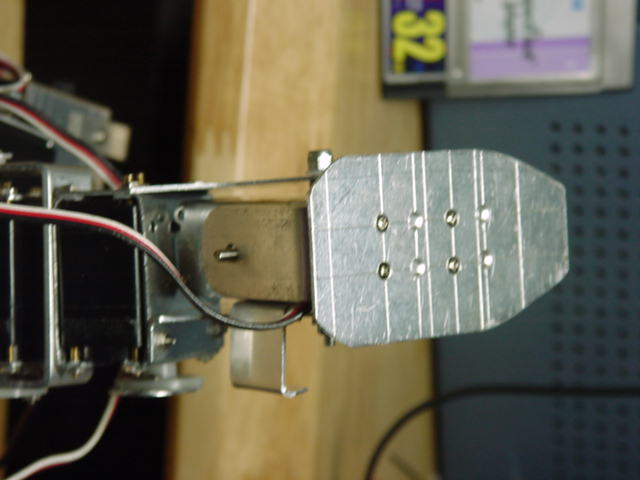
とりあえず、製作した足裏。かなり小さい。今回は色々な足裏を試して、歩行可能な足裏を見つけようと思う。まぁ、時間があればの話ですが、なんとかなるでしょう。(笑)
年内に腕までは間に合わないので、足の完成を目指す!!明日が最後のチャンス。気合を入れなおす。何が何でも右足を完成させる。今回はプログラムも新しくするので、それらのテストは30日くらいにやりたい所。どのみち1月は他の用事で、ロボットに構ってやれない。
▼新型RCサーボ



29日に気合で右足を完成させました。「腕まで製作できるかな?」と製作途中に思いましたが、今まで通り無理でした。
加工方法を見直す必要があるかもしれません。
翌日はコネクタ探しとタイロッド購入に秋葉原へ行ってきました。時期が時期なんでお店は半数以上がお休み。結局コネクタは買えず終い。
ロッドが短かったので、ラジコン屋の店員さんに聞いてみたところ、ロッドの長さは90mmまであるとのこと。「以前買ったのが38mmだから、50mmくらいでいいや」と適当に購入。
販売している会社は違いますが、以前購入した田宮製のタイロッドのパーツに問題なく装着できました。長さも足りているので、これでようやく動かせると言ったところ。
今年はなんとか下半身を完成させることに成功しました。しばらくは、加工もできないので配線の処理に時間を費やすことになるでしょう。1月始めはほとんど何もできない状態に・・・間に合うのか!?
それでは、良いお年をお迎えください!
第三回ROBO-ONE開始まで、あと32日
[BACK]
[TOP]
[NEXT]
Copyright (C) 2002 U-hirohito All rights reserved.

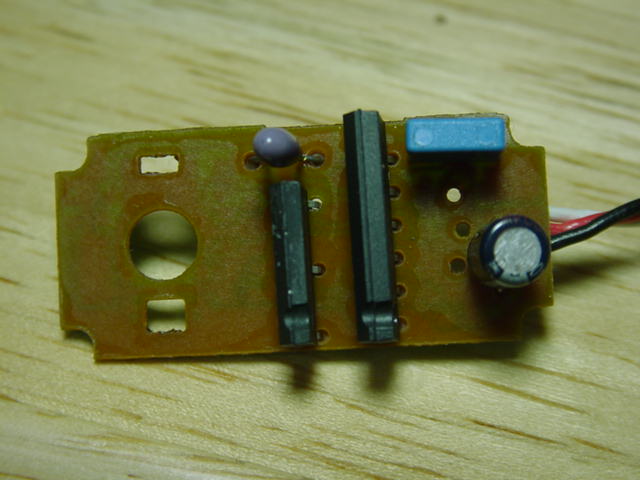
 双葉のS3003の中身を分解してみました。基板に使われているICは良く分かりませんが、そんなに複雑な回路じゃなさそうです。
双葉のS3003の中身を分解してみました。基板に使われているICは良く分かりませんが、そんなに複雑な回路じゃなさそうです。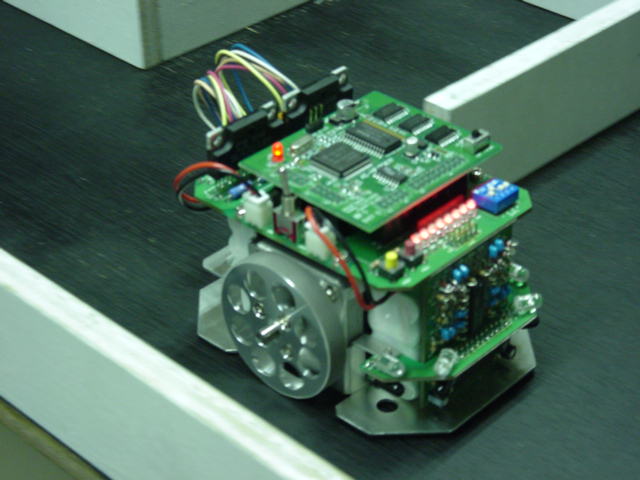
 二足とは関係ないですが、うちのサークルで動かした東日本支部標準マウス。ホコリかぶっていたマウス用迷路の上で元気よく走りました。(ただし、直進のみです)
二足とは関係ないですが、うちのサークルで動かした東日本支部標準マウス。ホコリかぶっていたマウス用迷路の上で元気よく走りました。(ただし、直進のみです)
 先月行われたROBO-ONE Technical Conferrenceにて、「腰の付け根などのサーボホーンに、剛性がないといけない。」と言われました。4月頃に製作された機体もこの辺の剛性が欠けていたので、片足立ちすらできませんでした。
先月行われたROBO-ONE Technical Conferrenceにて、「腰の付け根などのサーボホーンに、剛性がないといけない。」と言われました。4月頃に製作された機体もこの辺の剛性が欠けていたので、片足立ちすらできませんでした。