▼ヴェークヴァイザー大地に立つ!






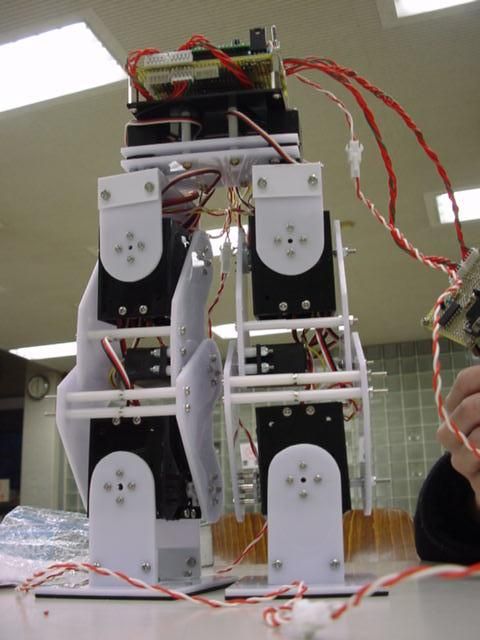
二足歩行ロボット(正面)の屈伸の様子。とりあえず最初に成功したロボットの動作です。
屈伸のムービーはこちらです。→44秒[991KB]
追記:ちなみに材料は3mmのABSの板で、これを切断して使用しています。固定方法は、
主にネジで他は接着剤で固定しています。(2004/9/10記)
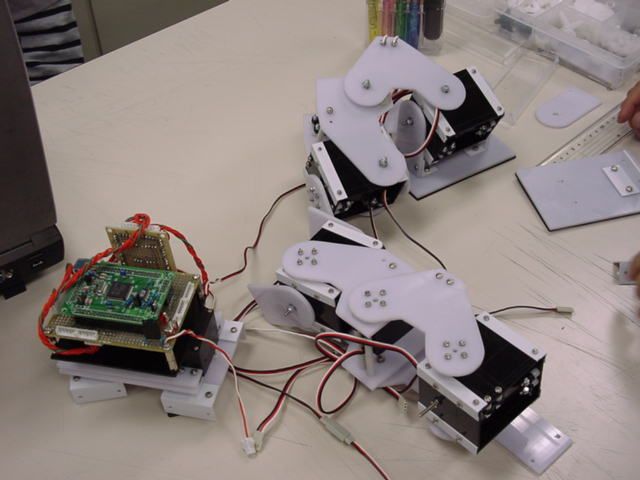
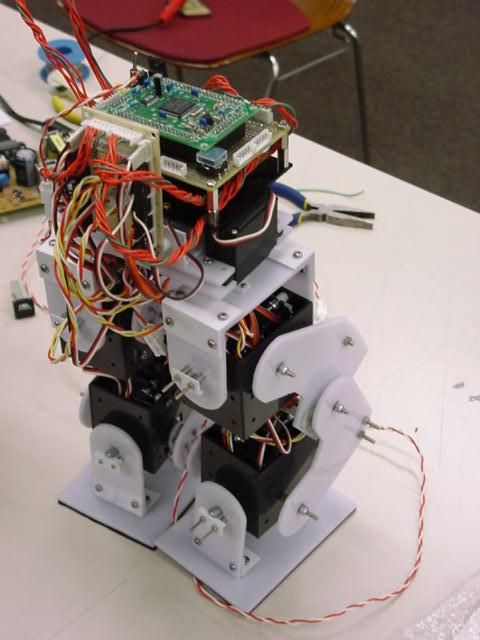
二足歩行ロボット前後の様子。配線をもう少しなんとかしたいですね。(^-^;
追記:この時はとにかく動かそうとしていたので、マイコンにカバーはありません。
今考えるとぞっとしますね。(-_- )(2004/9/10記)
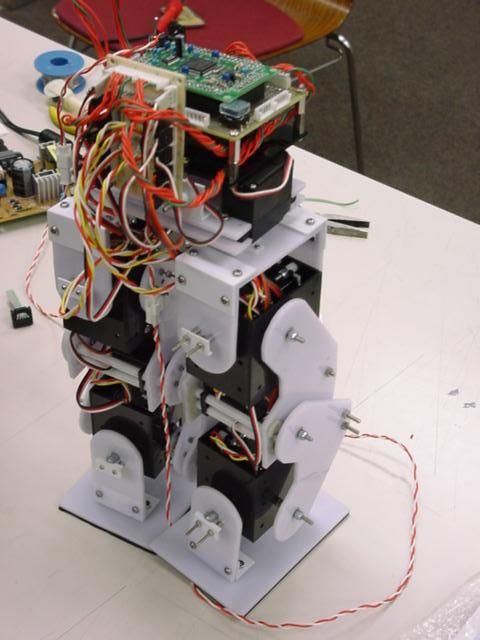
二足歩行ロボット(後背)の屈伸の様子。微妙にひざが曲がっています。結構大変でした。
追記:0から始めたため、たかが12自由度のRCサーボの信号もうまく生成できていません。
足元も良く見るとまっすぐじゃないし・・・Σ( ̄▽ ̄ )(2004/9/10記)
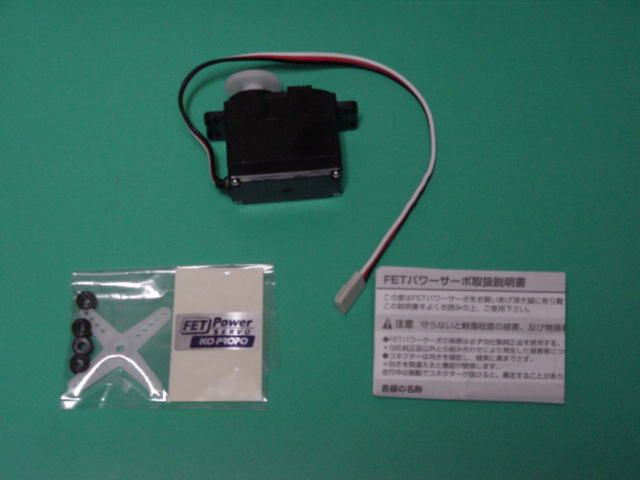
▼新型RCサーボ


今回メインで使うことが決まった、KO PROPO製のPS-2174FETです。
トルクは12kg/cm出ます。値段は6500円でした。
KO PROPO
㈱日本橋模型

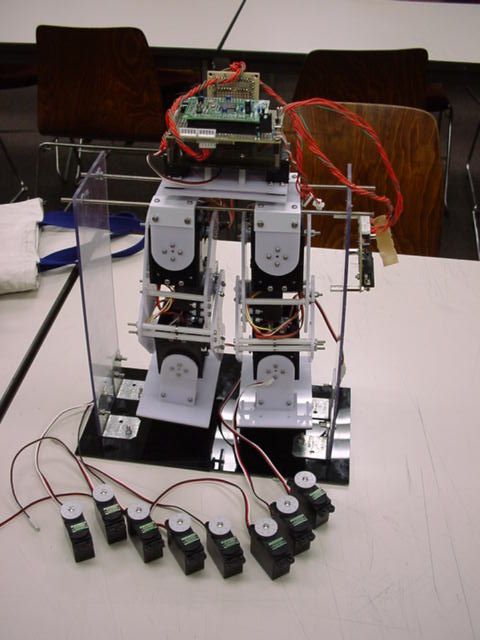
ロボットを固定するコンテナに搭載されている二足歩行ロボットです。これからサーボを取り替えることになります。
追記:なぜ取り替えるのかというと、我々が購入し、装着したRCサーボは
引き込みサーボと言うもので、
RC飛行機の車輪を格納する専用のRCサーボだったのです。
そのため、0°~180°どちらか一方まで動いたら止まります。
角度制御は
不可能です。
全員ラジコン飛行機に関しては無知。こんなのあるなんて知りませんよ。(T-T)(2004/9/10記)


二足歩行ロボットにポーズを取らせて見ました。当然、プログラムも何もしていません。


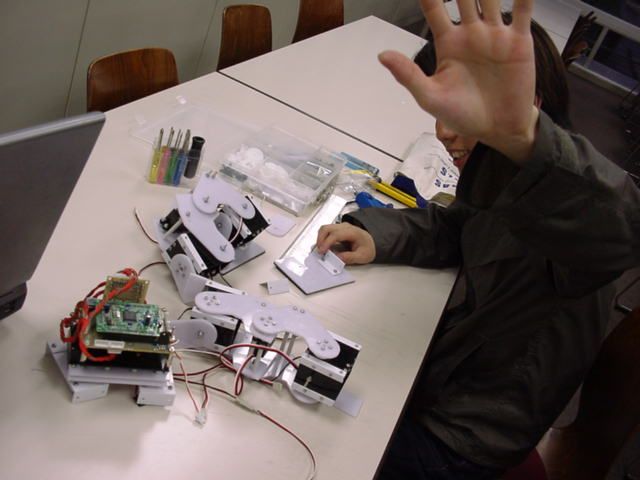
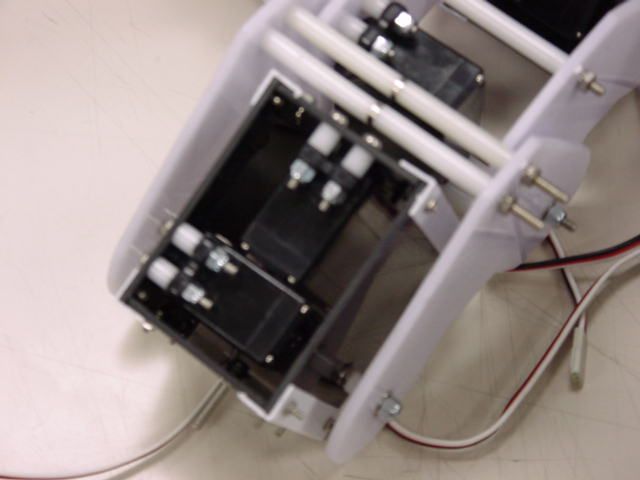
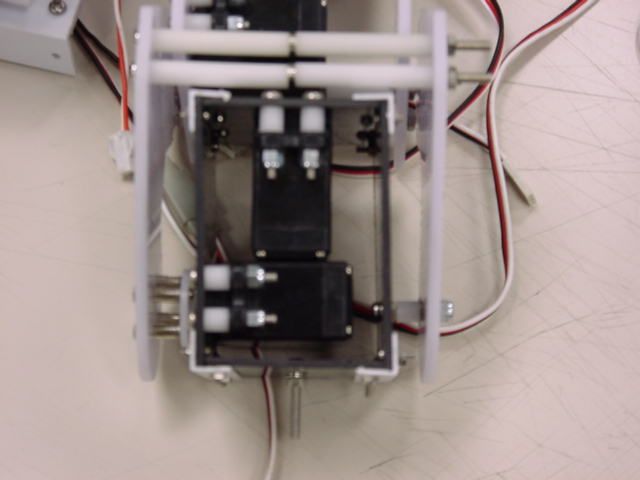
二軸サーボユニットの交換作業中です。写真に写ってる彼が、交換してくれています。

「初公開!これが二軸サーボユニットだ!」って、そんなに凄い物でもないのですが・・・
このサーボの塊が、足首、腰に搭載されています。ついに本領発揮か!?
2002/4/9現在では、足の換装を終えていません。
[BACK]
[TOP]
[NEXT]
Copyright (C) 2002 U-hirohito All rights reserved.


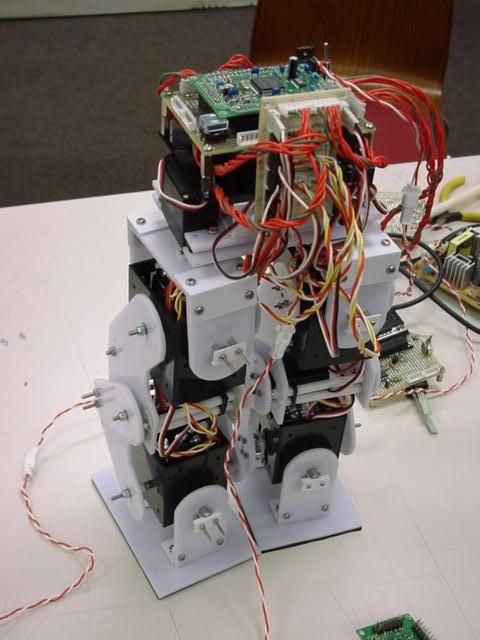
 二足歩行ロボット(正面)の屈伸の様子。とりあえず最初に成功したロボットの動作です。
二足歩行ロボット(正面)の屈伸の様子。とりあえず最初に成功したロボットの動作です。